请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8462 主题中讨论的其他器件:, DRV8962
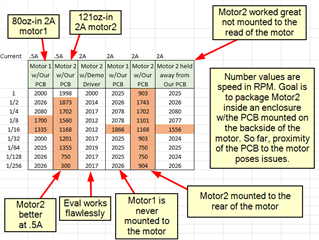
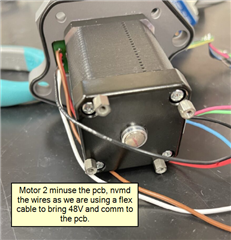
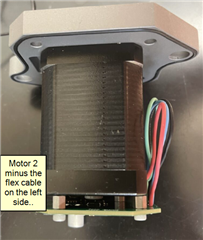
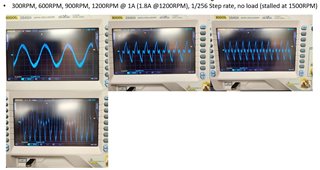
我在 NEMA 17步进的背面有一个分级的电路(上行、驱动器、电源)(120oz-in、2A、3.9mH、48VDC)。 我注意到、当我们通过延长相线将 PCB 与电机分离时、我们能够步进/微步进高达1500rpm。 当我们将 PCB 安装在电机的背面(以将后部磁体用于编码器)时、我们会看到我们开始失去步进并非常快地失速(在整步中效果更好、但随着我们开始降低步进速率而变得更糟)。 我们似乎遇到了一些 EMI/噪声。 您会检查哪些合适的必选项目? 更好的是、谁遇到了这种情况、您的解决方案是什么? 提前感谢,这个论坛是伟大的。

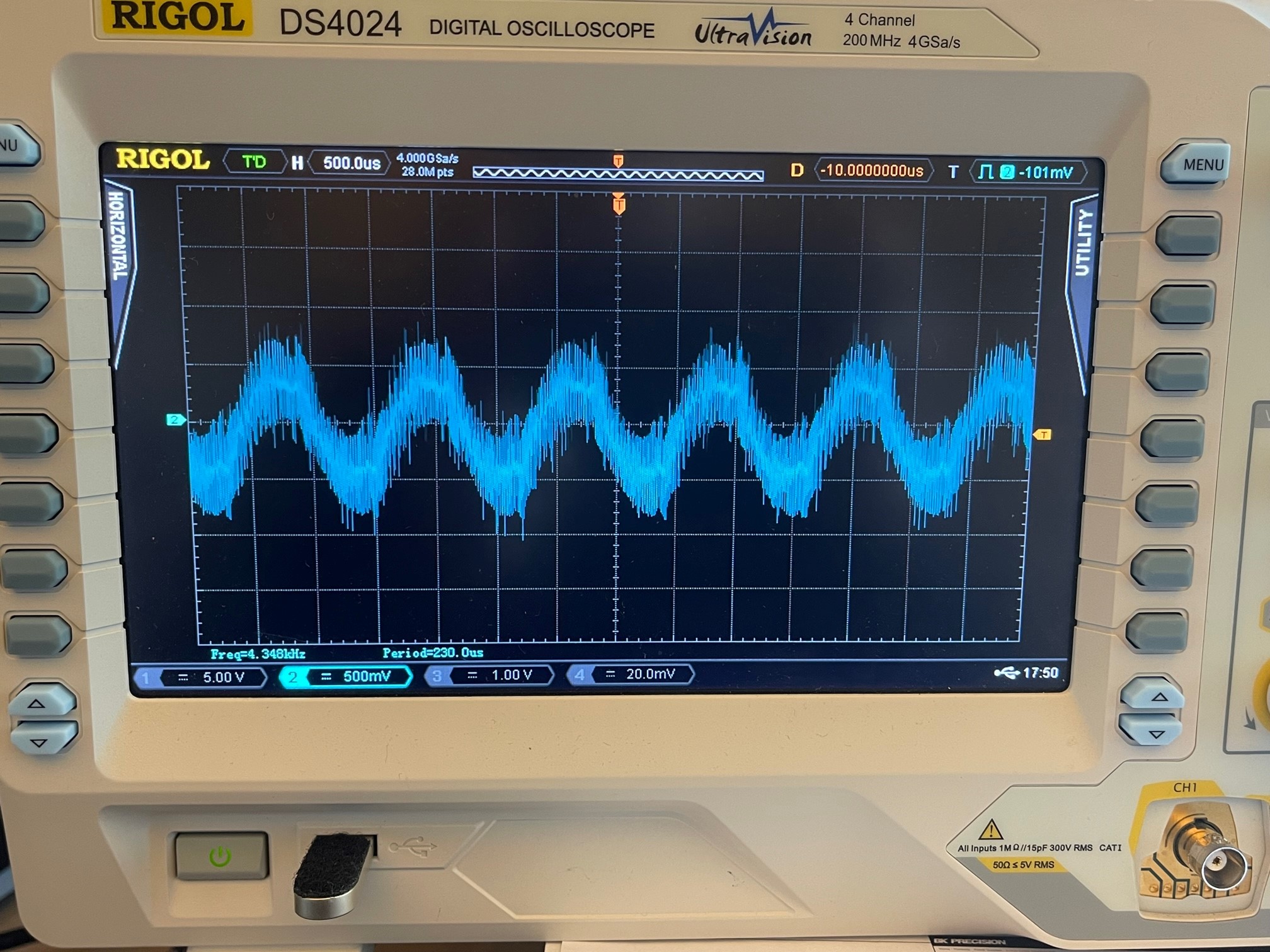
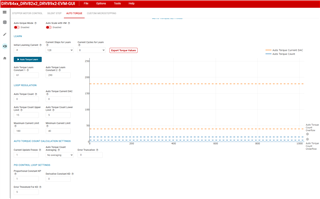
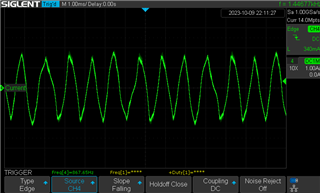
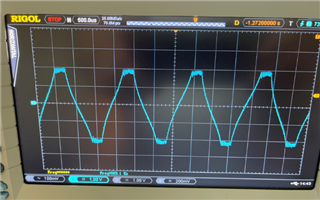 在失速之前、达到电流电平
在失速之前、达到电流电平 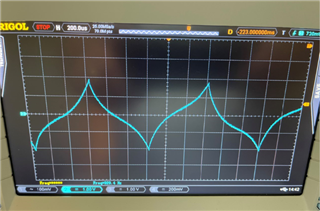 开始接近零时、驱动器是否正在达到电流?
开始接近零时、驱动器是否正在达到电流? 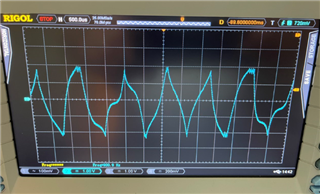 当衰减模式开始变化(?)时、开始产生问题
当衰减模式开始变化(?)时、开始产生问题 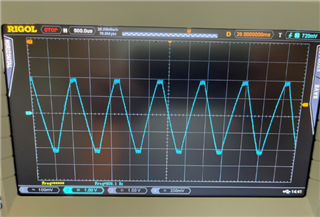 啊、我们失速了。
啊、我们失速了。 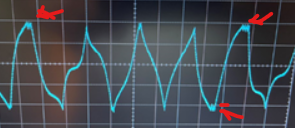
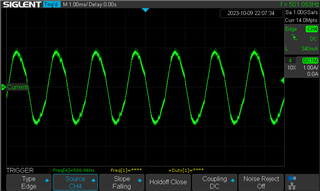
 这是 Motor2位于外壳内部时的 STEP 引脚。
这是 Motor2位于外壳内部时的 STEP 引脚。 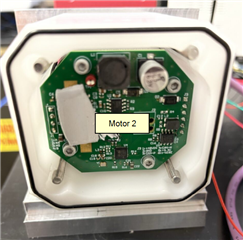
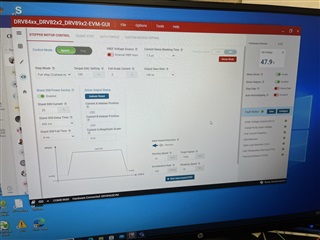
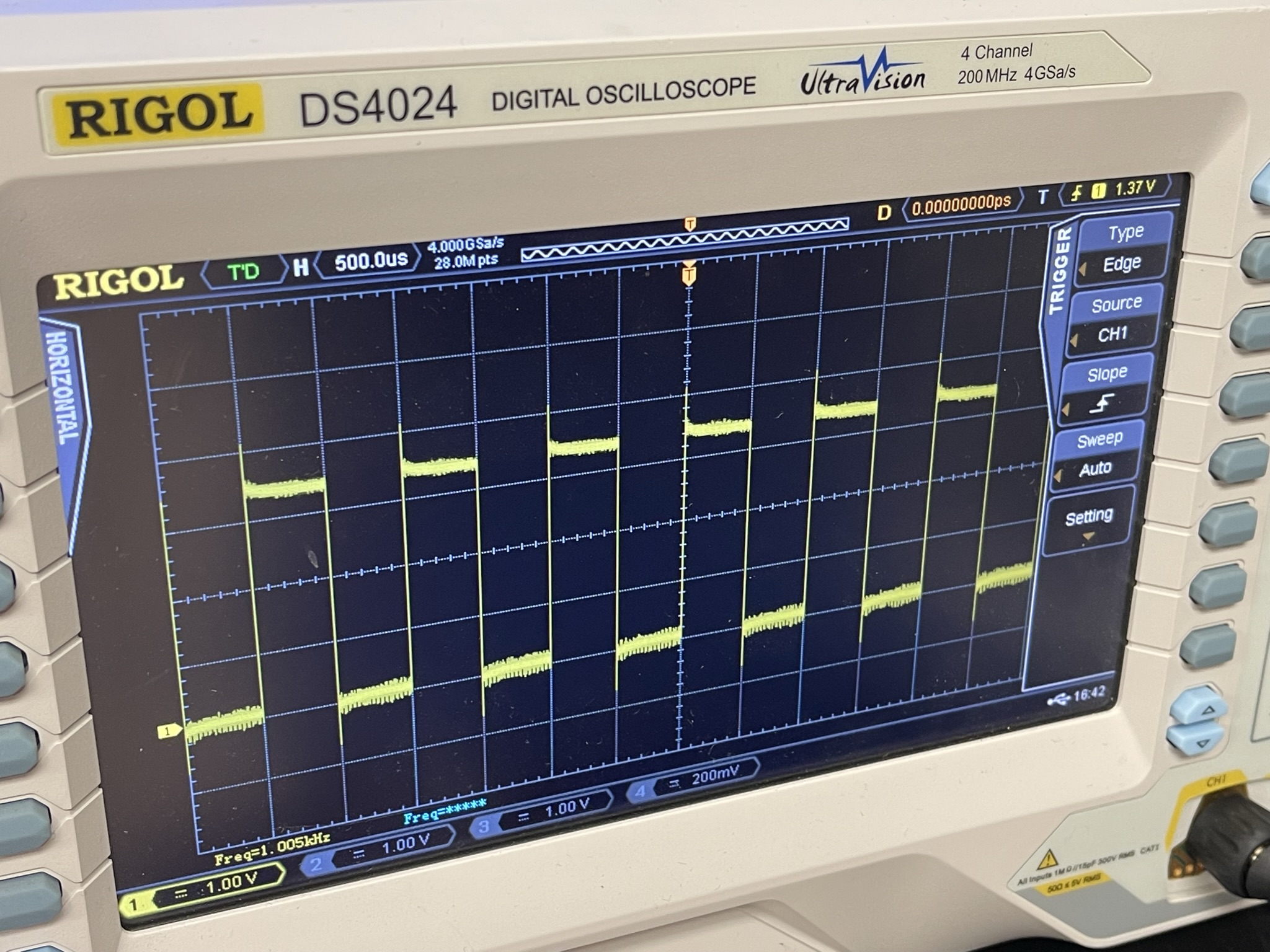
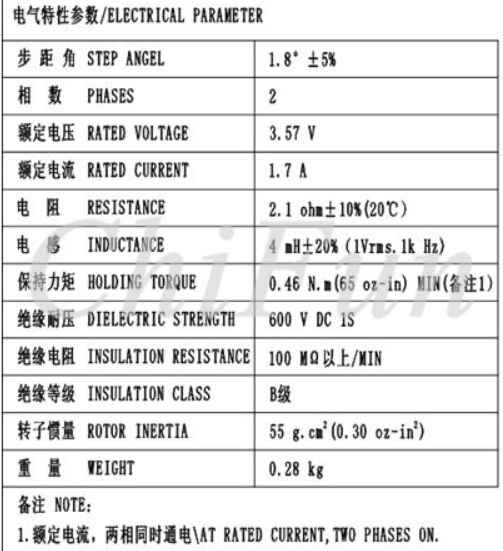
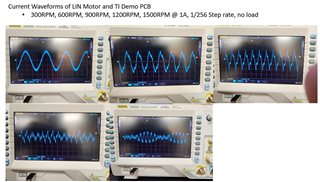
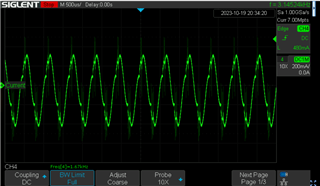
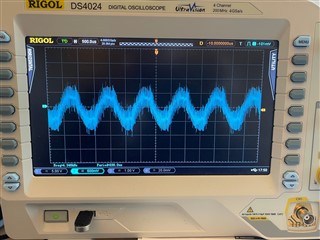 我们的设置@256步长、0.5A、1000rpm
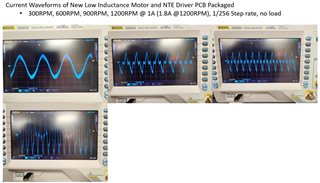
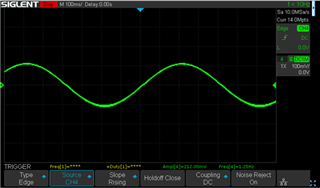
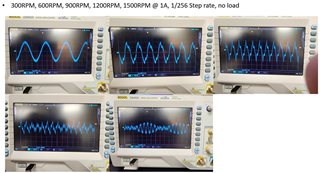
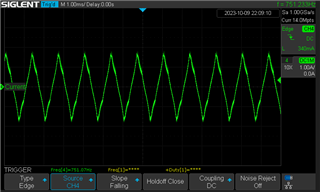
我们的设置@256步长、0.5A、1000rpm  购买的 具有一定速度的智能电机相电流。 如您所见、2000rpm 的稳定电流比我们所能产生的干净得多。
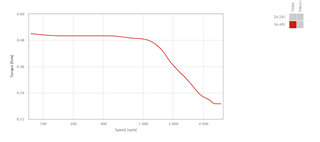
购买的 具有一定速度的智能电机相电流。 如您所见、2000rpm 的稳定电流比我们所能产生的干净得多。 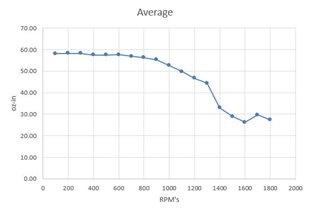 购买了智能电机在我们的 dyno 测得的扭矩(并不确定在1700rpm 时的上升)、尽管它确实类似于他们在48VDC 下的扭矩图中的规格。
购买了智能电机在我们的 dyno 测得的扭矩(并不确定在1700rpm 时的上升)、尽管它确实类似于他们在48VDC 下的扭矩图中的规格。