请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TPIC2060A 大家好、
主轴线圈数据(0x8324)现在可通过使用 DSP STM C6678 (1G) IC 单核主站中的10M SPI 数据速率来控制主轴电机数据(0x8324)、并 具有主轴电机 CAN 功能。
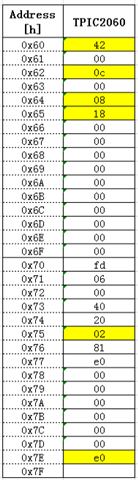
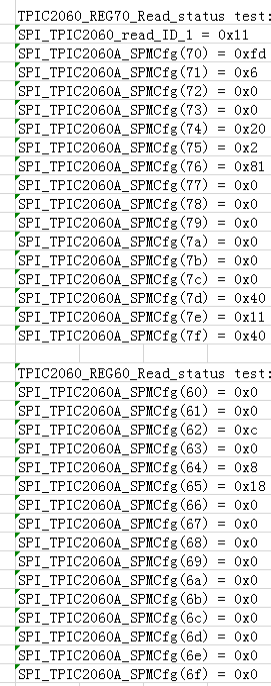
根据 IC 技术规格,BIT0位 FG 信号。转轴***用于 REG7F 中的转速监视器。 使用0x8324数据控制、FG 信号处于2.9684kHz (336us)的示波器频率上、而 DSP 主程序读取的 REG7F 在不断改变。
1)主轴的转速可以通过读取 REG7F FG 变化频率来控制吗?
2) DSP 芯片的工作频率为1GHz、理论上以1ns 运行、外加 SPI 的8位传输读取(10M)。 ・・・(8+2)・100ns=1us。 理论上读为336/(1*2)=168 HIGH 或168 LOW。 仿真状态下 REG7读取的 FG (BIT0)持续跳变。 您能帮助检查这些计算结果是否正确吗?
您能帮助检查这个问题吗? 谢谢。
此致、
切里