

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8329EVM 主题中讨论的其他器件:MCF8329A
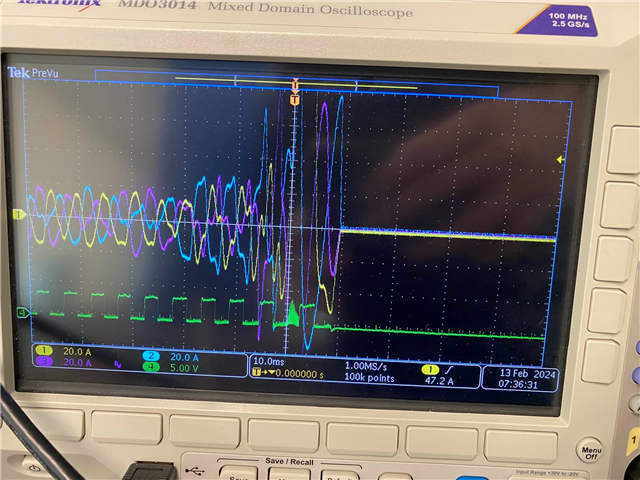
您好、在以较高负载运行电机时、我发现控制环路会不稳定。 我有可以控制的电机驱动和可调负载。 在无负载和较小负载的情况下运行正常、但当负载增大时、最终会出现下面示波器捕获中所示的情况。 电机似乎可以处理增加的负载长达几秒钟、但电流会在超出限值或电源过载无法跟上的情况下发生振荡。 我怀疑问题出在控制环路设置中、但我可以使用一些指导来确定查找位置。
电机的额定峰值为80A、ILIMIT 设置约为90A。 我这次看到的唯一故障可能是 APP_RESET 发生在总线欠压
在此第一个迹线中、通道1-3是相电流、通道4是总线电压

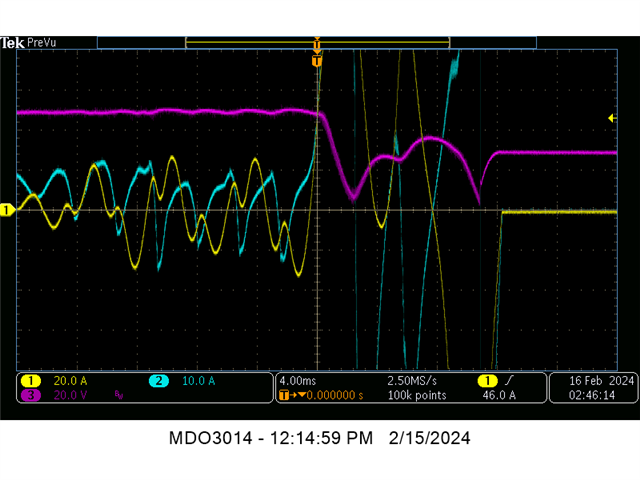
在第二个图中、CH4会通过 FGOUT 监控电机转速。 您可以在此处看到、RPM 在问题发生之前一直保持稳定、因此我不确定控制环路会对电流大幅增加做出什么反应


 6
6