

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8305-Q1EVM 主题中讨论的其他器件:DRV8305、C2000WARE、C2000WARE-MOTORCONTROL-SDK
我需要为 LaunchPad XL F28379D 和 DRV8305编写代码、用来使用霍尔传感器信号检测编码器的正确角度。 编码器具有三个信号 U、V 和 W、如下图所示。 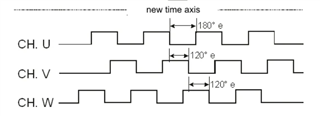
我们是否有 C2000ware 中的代码示例?
或者、是否有人会给我建议 tp 编写代码?
提前感谢您!
