请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316A 尊敬的所有人:
第一个问题:
我在图1中对电机转速感到困惑、数据表中的电机转速与 GUI 中的机械速度之间的关系是什么(图2)?
图1

图2
第二个问题:
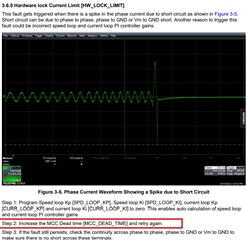
在 FIRST_CYCLE_FREQ_SEL 寄存器(图3)中、0Hz 的剂量是什么?
对于特定应用、我什么时候应该选择0Hz 功能才能获得最佳方法?

图3
我是 电机领域的新手、非常感谢您的分享~
祝你一切顺利~~