This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/1371565/mcf8315a-mcf8315a-controlling-14-pole-pair-motor-at-between-0-5-and-2-revs-per-minute
工具与软件:
我有一个应用要求以每分钟0.5至2转的速度旋转1kg 的负载。
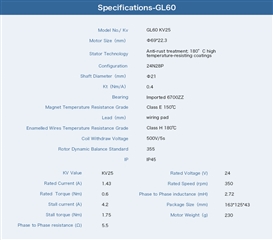
我已选择随附的 GL60KV25数据表中的 Cubemars 电机。
当我尝试缓慢运行电机时、我可以将装订速度降低至60RPM、但当我降低速度时、速度不稳定、您能建议我如何解决此问题吗?
{ "签名":"oneui-register-data"、 "数据":[] [ { "IDX":0、 "ID":"ISD_CONFIG"、 "值":"0x20738C20" }、 { "IDX":1、 "ID":"REV_DRIVE_CONFIG"、 "值":"0xA8200000" }、 { "IDX":2、 "ID":"MOTOR_STARTUP1"、 "值":"0x4B464D44" }、 { "IDX":3、 "ID":"MOTOR_STARTUP2"、 "值":"0xA296600C" }、 { "IDX":4、 "ID":"CLOSED_LOOP1"、 "Value":"0x8D340254" }、 { "IDX":5、 "ID":"CLOSED_LOOP2"、 "值":"0x0000CABF" }、 { "IDX":6、 "ID":"CLOSED_LOOP3"、 "值":"0x5F26582B" }、 { "IDX":7、 "ID":"CLOSED_LOOP4"、 "Value":"0x484C801E" }、 { "IDX":8、 "ID":"SPEED_PROFILES1"、 "值":"0x00000000" }、 { "IDX":9、 "ID":"SPEED_PROFILES2"、 "值":"0x00000000" }、 { "IDX":10、 "ID":"SPEED_PROFILES3"、 "值":"0x00000000" }、 { "IDX":11、 "ID":"SPEED_PROFILES4"、 "值":"0x800D0000" }、 { "IDX":12、 "ID":"SPEED_PROFILES5"、 "值":"0x00000000" }、 { "IDX":13、 "ID":"SPEED_PROFILES6"、 "值":"0x00000000" } ]、 [ { "IDX":0、 "ID":"FAULT_CONFIG1"、 "值":"0xF5381106" }、 { "IDX":1、 "ID":"FAULT_CONFIG2"、 "值":"0xF9100888" } ]、 [ { "IDX":0、 "ID":"INT_ALGO_1"、 "值":"0xA4334075" }、 { "IDX":1、 "ID":"INT_ALGO_2"、 "值":"0x000001A7" } ]、 [ { "IDX":0、 "ID":"PIN_CONFIG"、 "值":"0x00000002" }、 { "IDX":1、 "ID":"device_config1"、 "value":"0x00101462" }、 { "IDX":2、 "ID":"DEVICE_CONFIG2"、 "值":"0xC000F00F" }、 { "IDX":3、 "ID":"peri_config1"、 "值":"0x41C05F00" }、 { "IDX":4、 "ID":"GD_config1"、 "值":"0x9C450100" }、 { "IDX":5、 "ID":"GD_CONFIG2"、 "值":"0x80200000" } ]、 [ { "IDX":0、 "ID":"Gate_driver_fault_status"、 "值":"0x00000000" }、 { "IDX":1、 "ID":"controller_fault_status"、 "值":"0x00000000" } ]、 [ { "IDX":0、 "ID":"algo_status"、 "值":"0x0000FDE4" }、 { "IDX":1、 "ID":"MTR_PARAMS"、 "值":"0x00000000" }、 { "IDX":2、 "ID":"ALGO_STATUS_MPET"、 "值":"0x04000000" } ]、 [ { "IDX":0、 "ID":"ALGO_CTRL1"、 "值":"0x20000000" } ]、 [ { "IDX":0、 "ID":"ALGO_DEBUG1"、 "值":"0xC0A30000" }、 { "IDX":1、 "ID":"ALGO_DEBUG2"、 "值":"0x00000000" }、 { "IDX":2、 "ID":"current_pi"、 "值":"0x03280164" }、 { "IDX":3、 "ID":"SPEED_PI"、 "值":"0x03470247" }、 { "IDX":4、 "ID":"DAC_1"、 "值":"0x00000000" }、 { "IDX":5、 "ID":"DAC_2"、 "值":"0x00000000" } ]、 [ { "IDX":0、 "ID":"algorithm_State"、 "值":"0x00120007" }、 { "IDX":1、 "ID":"FG_SPEED_FDBK"、 "值":"0x7FFFFFFF" }、 { "IDX":2、 "ID":"BUS_CURRENT"、 "值":"0x00000000" }、 { "IDX":3、 "ID":"PHASE_CURRENT_A"、 "value":"0x05900000" }、 { "IDX":4、 "ID":"PHASE_CURRENT_B"、 "值":"0xFD780000" }、 { "IDX":5、 "ID":"PHASE_CURRENT_C"、 "值":"0xFE5C0000" }、 { "IDX":6、 "ID":"CSA_GAIN_FEEDBACK"、 "值":"0x00010003" }、 { "IDX":7、 "ID":"voltage_gain_FEEDBACK"、 "Value":"0x00000001" }、 { "IDX":8、 "ID":"VM_VOLTAGE"、 "值":"0x03418000" }、 { "IDX":9、 "ID":"PHASE_VOLTAGE_VA"、 "值":"0x00000000" }、 { "IDX":10、 "ID":"PHASE_VOLTAGE_VB"、 "值":"0x00000000" }、 { "IDX":11、 "ID":"PHASE_VOLTAGE_VC"、 "值":"0x00000000" }、 { "IDX":12、 "ID":"SIN_COMMUTATION_ANGLE"、 "值":"0xF8000000" }、 { "IDX":13、 "ID":"COS_COMMUTATION_ANGLE"、 "值":"0x00000000" }、 { "IDX":14、 "ID":"IALPHA"、 "值":"0x04A00000" }、 { "IDX":15、 "ID":"IBETA"、 "值":"0x00000000" }、 { "IDX":16、 "ID":"VALPHA"、 "值":"0x00775365" }、 { "IDX":17、 "ID":"VBETA"、 "值":"0x00000000" }、 { "IDX":18、 "ID":"ID"、 "Value":"0xFFF224C3" }、 { "IDX":19、 "ID":"IQ"、 "值":"0x05580000" }、 { "IDX":20、 "ID":" VD "、 "值":"0xFFFF2D2D" }、 { "IDX":21、 "ID":"VQ"、 "值":"0x00000000" }、 { "IDX":22、 "ID":"IQ_REF_ROTOR_ALIGN"、 "值":"0x00000000" }、 { "IDX":23、 "ID":"SPEED_REF_OPEN_LOOP"、 "值":"0x00000000" }、 { "IDX":24、 "ID":"IQ_REF_OPEN_LOOP"、 "值":"0x00000000" }、 { "IDX":25、 "ID":"SPEED_REF_CLOSED_LOOP"、 "值":"0x00000000" }、 { "IDX":26、 "ID":"ID_REF_CLOSED_LOOP"、 "值":"0x00000000" }、 { "IDX":27、 "ID":"IQ_REF_CLOSED_LOOP"、 "值":"0x00000000" }、 { "IDX":28、 "ID":"ISD_State"、 "值":"0x00000000" }、 { "IDX":29、 "ID":"ISD_SPEED"、 "值":"0x00000000" }、 { "IDX":30、 "ID":"IPD_State"、 "值":"0x00000000" }、 { "IDX":31、 "ID":"IPD_ANGLE"、 "值":"0x00000000" }、 { "IDX":32、 "ID":" ED "、 "值":"0x000FD1A3" }、 { "IDX":33、 "ID":"EQ"、 "Value":"0x0005AEFE" }、 { "IDX":34、 "ID":"SPEED_FDBK"、 "值":"0x037F1848" }、 { "IDX":35、 "ID":"THETA_EST"、 "值":"0xFEF142C9" } ]、 [ { "IDX":0 } ] ] }
这是 json 文件、我可以在其中获得大约6rpm 的速度、但速度不稳定、并且对 I2C 速度输入没有响应
尊敬的 John:
遗憾的是、您遇到了无传感器 BLDC 换向算法的极限。 闭环估算器依赖于使用 BEMF 来估算电机位置和转速、因此当电机在极低的速度下没有生成足够的 BEMF 时、FOC 算法将无法继续准确换向、并且电机可能会失速。
通常、该器件能够可靠地支持低速度(低至电机额定最大速度的大约10%)。 任何较低的值都存在 BEMF 不足、电机失速或换向无法同步的风险。
对于极低速或位置控制应用、我建议选择使用有传感器换向的电机驱动器(例如支持霍尔传感器输入的 MCT8316Z 或 MCT8315Z)。 如果需要无传感器换向算法、我建议利用外部齿轮箱/减速器(或选择带有内置齿轮箱的电机)来降低电机转速。
此致、 Eric C.
电机上有一个2048计数的正交编码器、如果使用该编码器、推测我需要在外部微控制器中关闭速度环路。 如果我这么做、您是否预计电流环路上的增益需要保持在零?
通常、我会将 MCF8315A 的电流环路 KP 和 KI 寄存器保留为零、并让器件算法 在运行时自动确定增益。 该器件非常擅长确定可靠的电流环路 Kp 和 Ki 值。
是的、您需要使用外部微控制器处理编码器并将其用于控制速度或位置。 不过、这不能消除器件内置的无传感器算法在低速运行时的限制。