请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCF8316A 主题中讨论的其他器件:、 MSP430FR2355
工具与软件:
您好!
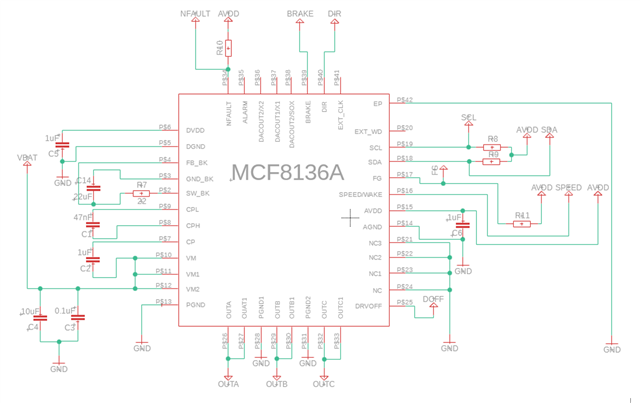
我有关于 MCF8316A 的问题。 我想在没有任何 UC 的情况下使用它。 我使该图与数据表中的示例完全相同、如上图所示[R8、R9、R10、R11= 5.6kohm ]。 制动器通过一个10k 电阻器从外部连接到 GND、方向引脚通过一个10k 电阻器连接到 AVDD。 此时具有所有必需的电压:AVDD=3.3V;DVDD=1.5V;降压/LDO 稳压器处于电阻模式=5V;CP=17V (VM=12V)。 我还插入了 BLDC 电机、即无人机 1 [DJI mini-3]、但未旋转。 在这种情况下、我还应该怎么做才能使电机旋转?