If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
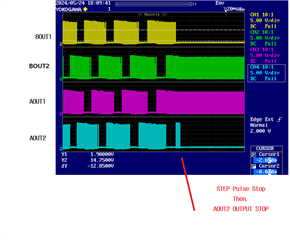
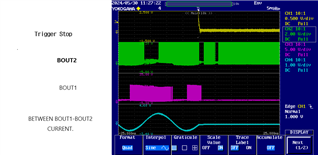
感谢您的澄清。 我现在看到了。 您正在查看 AOUT1/2和 BOUT1/2引脚相对于 GND 的电压输出波形。 这些是 TON 周期。 应该观察通过线圈 A 和 B 的电流波形。当步进脉冲停止时、根据分度器表、索引将在最后一个位置停止、并且输出线圈电流取决于所使用的步进模式、请参阅数据表中的表7.7至7.9。
停止时、如果 A 或 B 线圈中的电流不为零、则您将在 A 或 B 或两个输出中看到相应的激励模式(该电流电平的电流调节)。 即使电流为零、输出端也可能有一些 TON 和 tOFF 周期。 这是正常行为。