

主题中讨论的其他器件: MCF8316AEVM、MCF8316A
工具与软件:
尊敬的 TI:
我们计划使用 MCF8316C-Q1在有限范围和有限时间内驱动某些 BLDC 电机。 我已经阅读过 MCF8316C-Q1的数据表、理解起来会有一点复杂...
我的问题如下、您能帮助分析一下吗? 非常感谢。
MCF8316C-Q1的 I2C 地址(目标 ID)是什么? 除了示例中的0x60、我在数据表中没有看到直接的描述。 0x60是它的唯一目标 ID 吗?
2.在我们的产品中、必须在限定的时间内(如3秒)完成特定的转速范围、目标转速大约为600RPM。 这个目标速度是否足以生成足够的 BEMF 以供 MCF8316识别? (可在下面看到性能曲线)
我手头有 MCF8316AEVM。 对于软件 Motor Studio (ver:0.1.18)、应该为"谐振峰值电流"和"最大速度"设置什么值?
(1)调整峰值电流参数
。 "额定峰值相 电流是电机在额定扭矩下消耗的峰值相电流"。 电机供应商提供的性能曲线为:
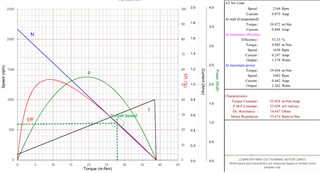
我们的目标速度约为600RPM、该速度应大于额定扭矩、然后相应的电流应大于 额定峰值相 电流。 应选择哪个点将其电流值设置为" 额定峰值电流"? 假设选择了电机额定扭矩下的电流、我们是否可以 在电流受到额定电流限制的情况下实现600RPM 的目标速度?
(2)最大速度
此参数应该设置为目标速度600RPM 还是空载速度2100RPM?
与 MPET 相关
(1) 对于来自同一 电机供应商的同一类型电机、MPET 结果是否相同? 我是否需要为每个电机执行 MPET?
(2) SPD_LOOP_KP/SPD_LOOP_KI 是否恒定? 如果我在无负载的电机上运行 MPET、 SPD_LOOP_KP/SPD_LOOP_KI 是否可以从该运行中获得 用于 有负载电机的该运行?
我们将使用另一个 MCU 通过 I2C 与 MCF8316Q-Q1通信、因此我们无法直接使用 用于 MCF8316AEVM 的 MSP430FR2355-GUI-firmware。 向如此多的寄存器写入特殊值似乎既复杂又琐碎。 是否有一些简单的方法可以 在另一个 MCU 上配置 MCF8316Q-Q1?
在 DRV8889步进电机驱动器中、我们实施了加速和减速策略以实现平稳启动和停止。 是否需要 在 MCF8316上实施加速和减速策略? 或者我们只能设置目标速度。
谢谢!
Alex
