请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8329AEVM 主题中讨论的其他器件:DRV8350、 UCC3626、 DRV8353
工具与软件:
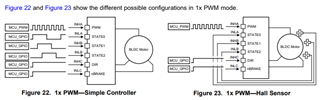
我们可以应用以48DDC 工作所需的四象限 BLDC 电机控制器驱动器。 它需要内部栅极驱动器逻辑来与外部 N-FET 连接。 它还需要有内部霍尔逻辑用于内部换向。 外部控制器为微处理器、可提供速率为200kHz 的 PWM 逻辑信号、支持故障、方向以及使能逻辑信号。 我们需要向微处理器提供电流反馈、在该芯片内部、我们还需要逐周期电流限制功能。 请问您能不能推荐一种单芯片解决方案?