主题中讨论的其他器件: LAUNCHXL-F280025C、 DRV8323
工具与软件:
您好!
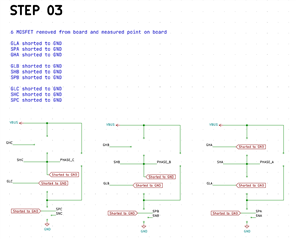
昨晚的道路测试我的新焊接定制板也损坏,这是我的第三板,这次一相(相 A)上和下 MOSFET 损坏( D S 短接)
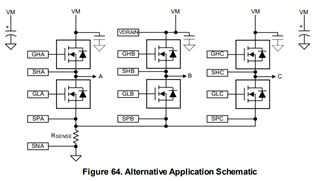
我的定制板是99.9%的复制 TI 参考设计 BOOSTXL-DRV8323RH + LAUNCHXL-F280025C 组合板、稍加修改、使用该组合板进行了几个月道路测试、没有任何问题、因此我可以总结出定制板损坏不是由1引起的。 软件 2.添加100V 电源电容3. 更改为1m Ω 分流电阻器
下面是我的板损坏的历史:
版本1:DRV8323损坏、TI 建议漏极和 VM 引脚都应保持靠近。
版本2: DRV8323和 C 相上 MOSFET 损坏、C 相栅极电阻器(20欧姆)损坏、以下是 BOOSTXL-DRV8323RH R1和 R5均未填充均 值 IDRIVE Hi-Z 120/IDRIVE、TI 建议在下一个设计中降低240mA 值。
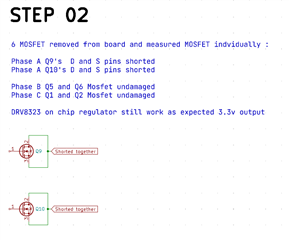
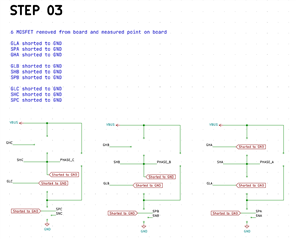
现在这一次版本3也损坏:
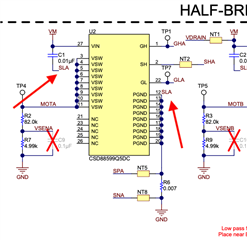
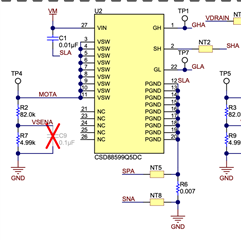
DRV 和 VM 短接/闭合在一起
2.栅极电阻替换为0欧姆
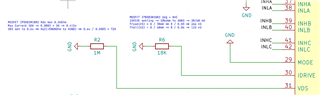
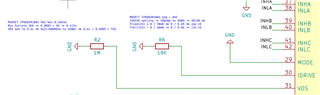
3. IDRVE 设置18K 欧姆至 AGND、这意味着30 / 60mA
4. VDS 1M 欧姆到 AGND、这意味着75A 切断
5.分流电阻0.001欧姆
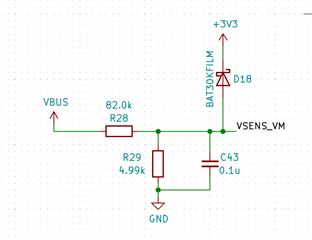
6. 100V 2200uF 线路电容器
更多信息:
1.我的 BOOSTXL-DRV8323RH + LAUNCHXL-F280025C 组合板和定制板都在6英寸滑板电机上进行了测试、SpeedHz 高达200Hz 30V OK
2. BOOSTXL-DRV8323RH + LAUNCHXL-F280025C 组合电路板道路测试、采用10节锂电池组42V、0.001Ohm 修改的分流电阻器、最大电流30A 速度和电流模式都正常
3.定制电路板无负载测试,采用30V 3A 电源,0.001通过欧姆分流电阻修改,速度和电流模式都没有问题,速度高达250Hz
4.定制板空载测试与 10s Lipo 包42V,0.001修改欧姆分流电阻器,速度模式可以承受,但电流模式损坏后几次测试..
我的观点是:
BOOSTXL-DRV8323RH + LAUNCHXL-F280025C 和我的定制板有何不同?
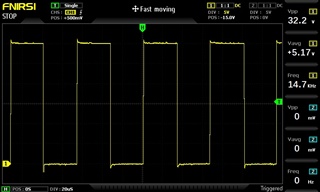
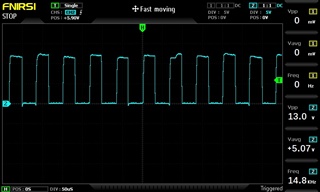
2.我的自定义板载驱动器6英寸滑板电机,速度高达200Hz,这是反射板信号是好的?
3.一旦损坏与42V ,这是指与电压不电流相关的问题?
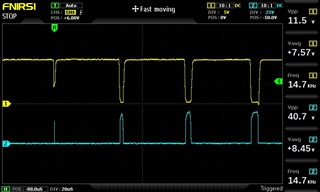
4、A 相上下 MOSFET 均受损,这与死区时间信号问题有关?
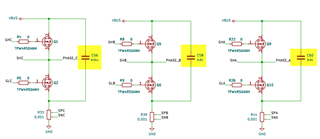
e2e.ti.com/.../6574.schematic.pdf
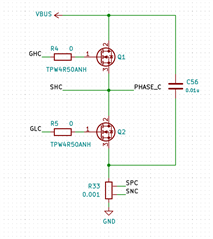
您是否认为此问题是由 C56电容器未直接连接到 GND 引起的? 但它是 TI 参考设计...
对不起,我的设计是基于 KiCAD,但我想让你的 Gerber 文件,如果你认为它是有帮助的!
Danny