Other Parts Discussed in Thread: DRV8873S-Q1EVM
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8873S-Q1EVM 工具与软件:
您好、TI 工程师:
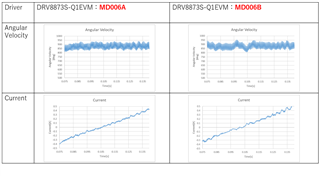
DRV8873S-Q1EVM 用于驱动电机、其电流由一个外部电流表进行测量。
当我们准备了2种控制器配置→DRV8873S-Q1EVM 并测量了同一电机的电流时、电流波形存在差异、我们研究之后发现、DRV8873S-Q1EVM 中的一个是 MD006A、另一个是 MD006B。
基于以上原因、我想提出以下两个问题。
・MD006A 和 MD006B 更改
・电机电流波形是否可能在 MD006A 和 MD006B 之间变化?
(补充说明)
控制器的 PWM 信号连接到靠近 DRV8873S-Q1EVM 中心的引脚、并由 PWM 控制进行驱动。
电源设置为7V/3A。