Other Parts Discussed in Thread: DRV8434A, DRV8434
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8434AEVM 主题中讨论的其他器件:DRV8434A、 DRV8434
工具与软件:
我想问一个问题。
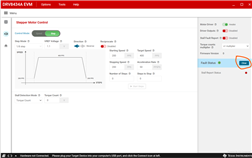
最近在使用 DRV8434A 演示板测试中、DRV8434A UI 界面中有一个如下图所示的 CLEAR 按钮、当电机在特意生成的失速信号后行驶到端子时、按下 CLEAR 后无法清除故障状态和失速报告状态故障、但有时可以再次清除、或在反方向执行几步后清除。 但当我用示波器查看 nSLEEP 信号时、可以看到它在33us 左右拉低、这符合数据表中的时序图。 我可以问为什么吗?