

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8329A 主题中讨论的其他器件:MCT8329EVM、 DRV8323、MCF8329A
工具与软件:
大家好、我的客户端有一个使用 DRV8323的 BLDC 无传感器风机控制器和第三方微控制器固件、并且想使用 MCT8329控制器更改解决方案。 我们正在使用 MCT8329EVM 和 MCT8329A GUI V 1.1.3进行开发。 它会起作用、但有时在启动时和中等加速率下、控制器会出现 LOSS_OF_SYNC 错误。 (注:使用我的客户实际解决方案,他们可以达到非常高的加速率)
我在示波器上测量了2个花瓶、使用同一个鼓风机、并在梯形信号中注意到了一些差异。 (注:未显示第三个花瓶)
下图是一个没有问题的原始客户端控制器。
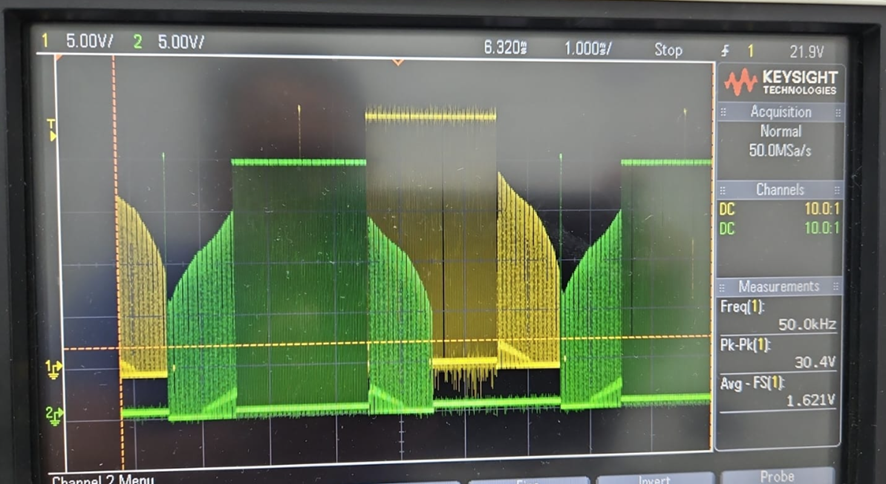
在我们的解决方案下方: 存在一个没有电压感应信号的间隔

MCT8329A 中是否有一些寄存器配置可用于调整此值?
