Other Parts Discussed in Thread: TMP1075, MSP430FR2433
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP-EXP430G2ET 主题中讨论的其他器件:TMP1075、 MSP430FR2433
您好!
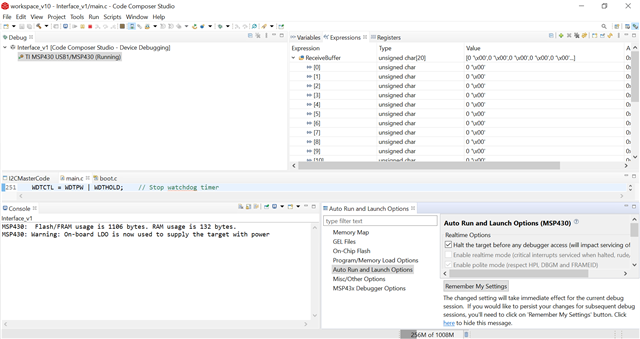
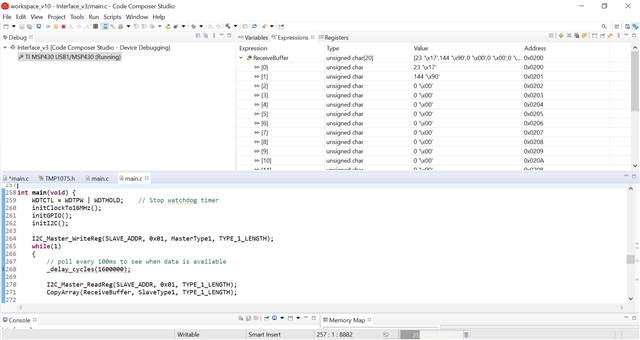
我目前正在尝试通过 I2C 通信将 MSP430G2ET 连接到 TMP1075。 下面是我在 Code Composer Studio 中使用的代码以及我看到的输出、根据我的理解、我必须更正 TMP1075的地址、但当我尝试读取"接收缓冲器值时、我只看到0x00。 我应该读取另一个值吗?我通过 I2C 进行通信的方式是否有问题?
//******************************************************************************
// MSP430G2xx3 Demo - USCI_B0, I2C Master multiple byte TX/RX
//
// Description: I2C master communicates to I2C slave sending and receiving
// 3 different messages of different length. I2C master will enter LPM0 mode
// while waiting for the messages to be sent/receiving using I2C interrupt.
// ACLK = NA, MCLK = SMCLK = DCO 16MHz.
//
//
// MSP430G2553 3.3V
// ----------------- /|\ /|\
// /|\ | | | 4.7k
// | | | 4.7k |
// ---|RST | | |
// | | | |
// | P1.6|---|---+- I2C Clock (UCB0SCL)
// | | |
// | P1.7|---+----- I2C Data (UCB0SDA)
// | |
// | |
//
// Nima Eskandari
// Texas Instruments Inc.
// April 2017
// Built with CCS V7.0
//******************************************************************************
#include <msp430.h>
#include <stdint.h>
#include <stdbool.h>
//******************************************************************************
// Example Commands ************************************************************
//******************************************************************************
#define SLAVE_ADDR 0x48
#define CONVERSION_READY 0x10
/* CMD_TYPE_X_SLAVE are example commands the master sends to the slave.
* The slave will send example SlaveTypeX buffers in response.
*
* CMD_TYPE_X_MASTER are example commands the master sends to the slave.
* The slave will initialize itself to receive MasterTypeX example buffers.
* */
#define CMD_TYPE_0_SLAVE 0
#define CMD_TYPE_1_SLAVE 1
#define CMD_TYPE_2_SLAVE 2
#define CMD_TYPE_0_MASTER 3
#define CMD_TYPE_1_MASTER 4
#define CMD_TYPE_2_MASTER 5
#define TYPE_0_LENGTH 1
#define TYPE_1_LENGTH 2
#define TYPE_2_LENGTH 6
#define MAX_BUFFER_SIZE 20
/* MasterTypeX are example buffers initialized in the master, they will be
* sent by the master to the slave.
* SlaveTypeX are example buffers initialized in the slave, they will be
* sent by the slave to the master.
* */
uint8_t MasterType2 [TYPE_2_LENGTH] = {'F', '4', '1', '9', '2', 'B'};
//uint8_t MasterType1 [TYPE_1_LENGTH] = { 8, 9};
uint8_t MasterType1 [TYPE_1_LENGTH] = { 0x00, 0xFF};
uint8_t MasterType0 [TYPE_0_LENGTH] = { 11};
uint8_t SlaveType2 [TYPE_2_LENGTH] = {0};
uint8_t SlaveType1 [TYPE_1_LENGTH] = {0};
uint8_t SlaveType0 [TYPE_0_LENGTH] = {0};
//******************************************************************************
// General I2C State Machine ***************************************************
//******************************************************************************
typedef enum I2C_ModeEnum{
IDLE_MODE,
NACK_MODE,
TX_REG_ADDRESS_MODE,
RX_REG_ADDRESS_MODE,
TX_DATA_MODE,
RX_DATA_MODE,
SWITCH_TO_RX_MODE,
SWITHC_TO_TX_MODE,
TIMEOUT_MODE
} I2C_Mode;
/* Used to track the state of the software state machine*/
I2C_Mode MasterMode = IDLE_MODE;
/* The Register Address/Command to use*/
uint8_t TransmitRegAddr = 0;
/* ReceiveBuffer: Buffer used to receive data in the ISR
* RXByteCtr: Number of bytes left to receive
* ReceiveIndex: The index of the next byte to be received in ReceiveBuffer
* TransmitBuffer: Buffer used to transmit data in the ISR
* TXByteCtr: Number of bytes left to transfer
* TransmitIndex: The index of the next byte to be transmitted in TransmitBuffer
* */
uint8_t ReceiveBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t RXByteCtr = 0;
uint8_t ReceiveIndex = 0;
uint8_t TransmitBuffer[MAX_BUFFER_SIZE] = {0};
uint8_t TXByteCtr = 0;
uint8_t TransmitIndex = 0;
/* I2C Write and Read Functions */
/* For slave device with dev_addr, writes the data specified in *reg_data
*
* dev_addr: The slave device address.
* Example: SLAVE_ADDR
* reg_addr: The register or command to send to the slave.
* Example: CMD_TYPE_0_MASTER
* *reg_data: The buffer to write
* Example: MasterType0
* count: The length of *reg_data
* Example: TYPE_0_LENGTH
* */
I2C_Mode I2C_Master_WriteReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t *reg_data, uint8_t count);
/* For slave device with dev_addr, read the data specified in slaves reg_addr.
* The received data is available in ReceiveBuffer
*
* dev_addr: The slave device address.
* Example: SLAVE_ADDR
* reg_addr: The register or command to send to the slave.
* Example: CMD_TYPE_0_SLAVE
* count: The length of data to read
* Example: TYPE_0_LENGTH
* */
I2C_Mode I2C_Master_ReadReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t count);
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count);
I2C_Mode I2C_Master_ReadReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t count)
{
/* Initialize state machine */
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
RXByteCtr = count;
TXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
/* Initialize slave address and interrupts */
UCB0I2CSA = dev_addr;
IFG2 &= ~(UCB0TXIFG + UCB0RXIFG); // Clear any pending interrupts
IE2 &= ~UCB0RXIE; // Disable RX interrupt
IE2 |= UCB0TXIE; // Enable TX interrupt
UCB0CTL1 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(CPUOFF + GIE); // Enter LPM0 w/ interrupts
return MasterMode;
}
I2C_Mode I2C_Master_WriteReg(uint8_t dev_addr, uint8_t reg_addr, uint8_t *reg_data, uint8_t count)
{
/* Initialize state machine */
MasterMode = TX_REG_ADDRESS_MODE;
TransmitRegAddr = reg_addr;
//Copy register data to TransmitBuffer
CopyArray(reg_data, TransmitBuffer, count);
TXByteCtr = count;
RXByteCtr = 0;
ReceiveIndex = 0;
TransmitIndex = 0;
/* Initialize slave address and interrupts */
UCB0I2CSA = dev_addr;
IFG2 &= ~(UCB0TXIFG + UCB0RXIFG); // Clear any pending interrupts
IE2 &= ~UCB0RXIE; // Disable RX interrupt
IE2 |= UCB0TXIE; // Enable TX interrupt
UCB0CTL1 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(CPUOFF + GIE); // Enter LPM0 w/ interrupts
return MasterMode;
}
void CopyArray(uint8_t *source, uint8_t *dest, uint8_t count)
{
uint8_t copyIndex = 0;
for (copyIndex = 0; copyIndex < count; copyIndex++)
{
dest[copyIndex] = source[copyIndex];
}
}
//******************************************************************************
// Device Initialization *******************************************************
//******************************************************************************
void initClockTo16MHz()
{
if (CALBC1_16MHZ==0xFF) // If calibration constant erased
{
while(1); // do not load, trap CPU!!
}
DCOCTL = 0; // Select lowest DCOx and MODx settings
BCSCTL1 = CALBC1_16MHZ; // Set DCO
DCOCTL = CALDCO_16MHZ;
}
void initGPIO()
{
P1DIR |= BIT0 + BIT1 + BIT2 + BIT3 + BIT4;
P1OUT &= ~(BIT0 + BIT1 + BIT2 + BIT3 + BIT4);
P1SEL |= BIT6 + BIT7; // Assign I2C pins to USCI_B0
P1SEL2|= BIT6 + BIT7; // Assign I2C pins to USCI_B0
}
void initI2C()
{
UCB0CTL1 |= UCSWRST; // Enable SW reset
UCB0CTL0 = UCMST + UCMODE_3 + UCSYNC; // I2C Master, synchronous mode
UCB0CTL1 = UCSSEL_2 + UCSWRST; // Use SMCLK, keep SW reset
UCB0BR0 = 160; // fSCL = SMCLK/160 = ~100kHz
UCB0BR1 = 0;
UCB0I2CSA = SLAVE_ADDR; // Slave Address
UCB0CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
UCB0I2CIE |= UCNACKIE;
}
//******************************************************************************
// Main ************************************************************************
// Send and receive three messages containing the example commands *************
//******************************************************************************
int main(void) {
WDTCTL = WDTPW | WDTHOLD; // Stop watchdog timer
initClockTo16MHz();
initGPIO();
initI2C();
I2C_Master_WriteReg(SLAVE_ADDR, 0x01, MasterType1, TYPE_1_LENGTH);
while(1)
{
// poll every 100ms to see when data is available
_delay_cycles(1600000);
I2C_Master_ReadReg(SLAVE_ADDR, 0x00, TYPE_1_LENGTH);
CopyArray(ReceiveBuffer, SlaveType1, TYPE_1_LENGTH);
// Check status of conversion ready bit
if(ReceiveBuffer[1] & CONVERSION_READY)
{
I2C_Master_ReadReg(SLAVE_ADDR, 0x00, TYPE_1_LENGTH);
CopyArray(ReceiveBuffer, SlaveType1, TYPE_1_LENGTH);
// Set break point here to examine results
_no_operation();
}
}
}
//******************************************************************************
// I2C Interrupt For Received and Transmitted Data******************************
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector = USCIAB0TX_VECTOR
__interrupt void USCIAB0TX_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCIAB0TX_VECTOR))) USCIAB0TX_ISR (void)
#else
#error Compiler not supported!
#endif
{
if (IFG2 & UCB0RXIFG) // Receive Data Interrupt
{
//Must read from UCB0RXBUF
uint8_t rx_val = UCB0RXBUF;
if (RXByteCtr)
{
ReceiveBuffer[ReceiveIndex++] = rx_val;
RXByteCtr--;
}
if (RXByteCtr == 1)
{
UCB0CTL1 |= UCTXSTP;
}
else if (RXByteCtr == 0)
{
IE2 &= ~UCB0RXIE;
MasterMode = IDLE_MODE;
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
}
else if (IFG2 & UCB0TXIFG) // Transmit Data Interrupt
{
switch (MasterMode)
{
case TX_REG_ADDRESS_MODE:
UCB0TXBUF = TransmitRegAddr;
if (RXByteCtr)
MasterMode = SWITCH_TO_RX_MODE; // Need to start receiving now
else
MasterMode = TX_DATA_MODE; // Continue to transmision with the data in Transmit Buffer
break;
case SWITCH_TO_RX_MODE:
IE2 |= UCB0RXIE; // Enable RX interrupt
IE2 &= ~UCB0TXIE; // Disable TX interrupt
UCB0CTL1 &= ~UCTR; // Switch to receiver
MasterMode = RX_DATA_MODE; // State state is to receive data
UCB0CTL1 |= UCTXSTT; // Send repeated start
if (RXByteCtr == 1)
{
//Must send stop since this is the N-1 byte
while((UCB0CTL1 & UCTXSTT));
UCB0CTL1 |= UCTXSTP; // Send stop condition
}
break;
case TX_DATA_MODE:
if (TXByteCtr)
{
UCB0TXBUF = TransmitBuffer[TransmitIndex++];
TXByteCtr--;
}
else
{
//Done with transmission
UCB0CTL1 |= UCTXSTP; // Send stop condition
MasterMode = IDLE_MODE;
IE2 &= ~UCB0TXIE; // disable TX interrupt
__bic_SR_register_on_exit(CPUOFF); // Exit LPM0
}
break;
default:
__no_operation();
break;
}
}
}
//******************************************************************************
// I2C Interrupt For Start, Restart, Nack, Stop ********************************
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector = USCIAB0RX_VECTOR
__interrupt void USCIAB0RX_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCIAB0RX_VECTOR))) USCIAB0RX_ISR (void)
#else
#error Compiler not supported!
#endif
{
if (UCB0STAT & UCNACKIFG)
{
UCB0STAT &= ~UCNACKIFG; // Clear NACK Flags
}
if (UCB0STAT & UCSTPIFG) //Stop or NACK Interrupt
{
UCB0STAT &=
~(UCSTTIFG + UCSTPIFG + UCNACKIFG); //Clear START/STOP/NACK Flags
}
if (UCB0STAT & UCSTTIFG)
{
UCB0STAT &= ~(UCSTTIFG); //Clear START Flags
}
}