请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2633 主题中讨论的其他器件: CAPTIVATE-BSWP、 MSP-EXP430FR2311
您好!
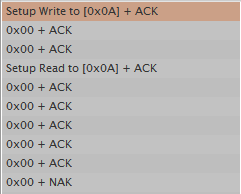
我尝试通过 I2C (批量)接口从 MSP430FR2633 MCU 读取接近传感器数据包。 我正在使用的从器件地址是0x0A。 因此、主器件(主机)发送以下序列:
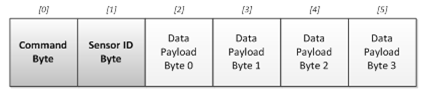
[0x00][0x01] (第一个字节0x00对应于命令 ID、第二个字节0x01对应于[接近传感器]的传感器 ID)。
我使用 i2cbsl.c 中的 i2c 帮助程序函数 因此,对于上述情况,我做如下:
uint8_t writeBuffer[2]={0x00、0x01};
uint8_t readBuffer[100];
MSP430BSL_I2CWriteRead (writeBuffer、2、readBuffer、8);
尽管我在 readBuffer 中获取了一些数据、但它看起来不像预期的那样。 例如、readBuffer 中的第一个字节和第二个字节不是0x00和0x01。 下面是我得到的顺序:
18 01 00 00 00 00 F9
18 01 00 01 00 00 00 F8
08 00 00 00 00 00 00
0C 01 00 00 00 0e
08 00 01 00 00 00 01
18 01 02 00 00 00 45
08 00 02 ff 00 00 00 00
14 01 03 00 00 00 00 f0
08 00 03 ff 00 00 01
(笑声) 重复很多次…
能不能帮我理解发生了什么? 有关调试的任何提示/信息都是最受欢迎的。 我是否可以参考有关如何解读各种数据包(传感器、周期、通用等)的文档(CapTIvate 技术指南除外)。
谢谢、
桑托什。