

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430G2432 大家好、
我有一个应用、其中有两个 PWM 输出相互补充(即当一个输出为25%时、另一个输出为75%)。 我使用计时器 A 来生成两个信号(此芯片上只有一个计时器)。 频率为1kHz。
以下是我的代码的作用:
1) 1) PWM1从低电平开始/ PWM2从高电平开始
2) 2) PWM1每10ms 上升0.1%、而 PWM2下降0.1%、直到分别达到100%和0%。
3) 3)程序等待5秒。
4) 4) PWM2每10ms 上升0.1%、PWM1下降0.1%、直到分别达到100%和0%。 与#2相反。
5) 5)程序等待五秒。
6) 6)步骤2至5无限期重复。
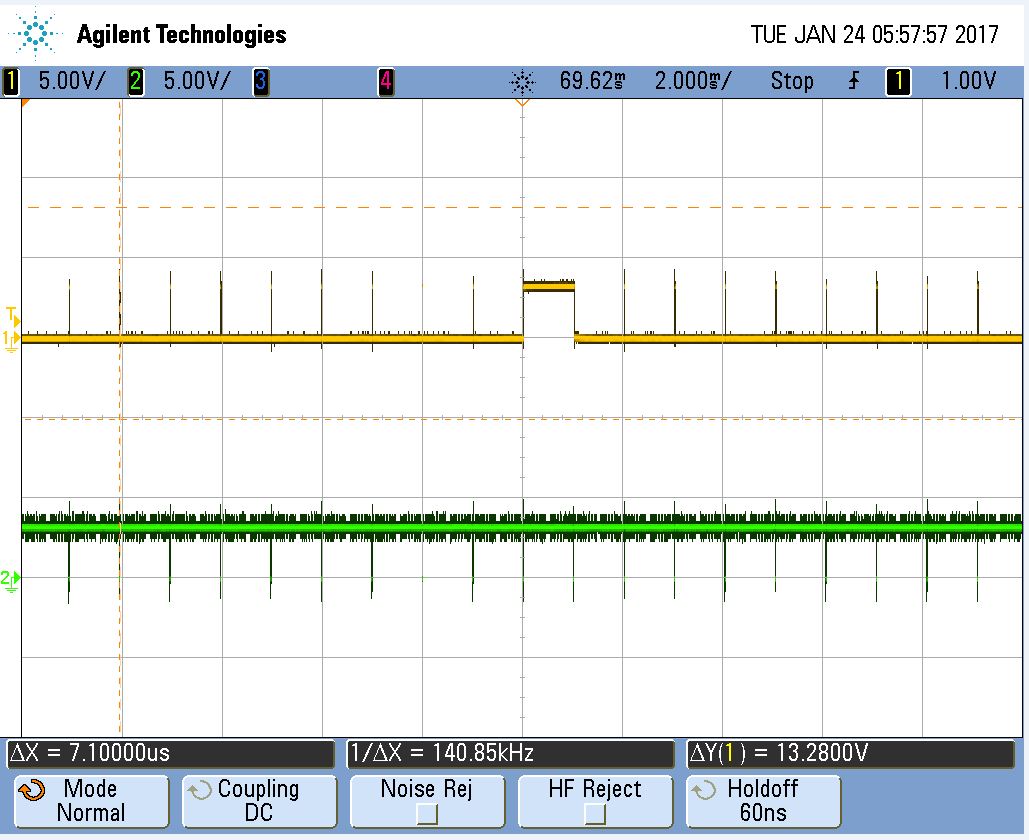
除了一个奇怪的问题外、它运行良好。 当 PWM1的占空比从~6%变为下一步时、信号在一个周期内保持高电平、然后返回到应该的位置。 下面是我的示波器屏幕截图。 这也会在从~95%到下一步的关断期间发生。
是否有人对如何解决问题有任何想法?
我尝试的一件事是在更改 TACCR1和 TACCR2中的值之前停止计时器、然后再重新启动计时器。 这没用。
提前感谢、
John

