请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP432P401R 您好!
需要有关以下问题的帮助。
设置2个 EVA 板一个是 MSP432P401R 另一个是 TI 的 TM4C。
这两个器件都运行稍作修改的 UART 回波示例。 UART 频率1MHz。
TM4C UART 发送器 MSP432是接收器。
TM4C 正在发送256字节的数据包、同时激活 DMA。
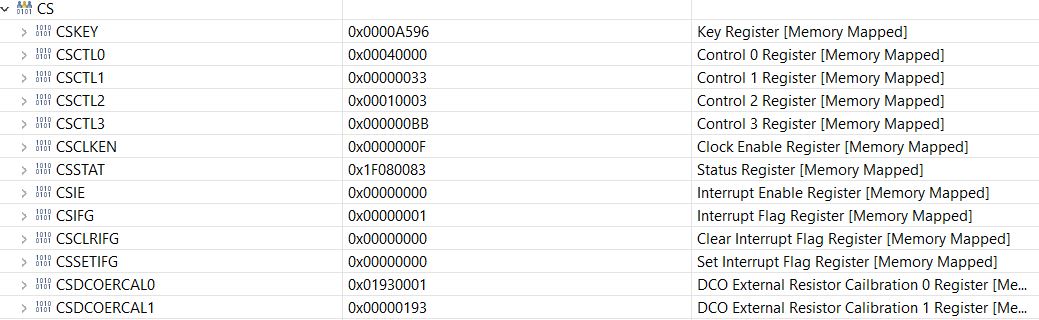
MSP432遇到 UART 溢出错误。
我使用 UART freq 运行、一切都好。。。
问题:为了消除接收器侧的 UARToverrun 错误、可以采取哪些措施?
谢谢