请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2475 工具与软件:
您好!
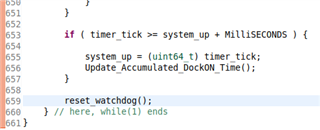
下面是我的 GPIO 中断代码片段。 计时器中断用于获取代码中的时间节拍。 当收到中断时、会检测到中断、代码有时会正常工作、但在大多数情况下、ISR 函数保持运行、而 while 循环无法执行、这会触发看门狗并将 MCU 复位。 您能建议以下代码的相关问题吗? 计时器 ISR 每1ms 执行一次。
void GPIO_init (void)
{
P1DIR &=~BIT2;
P1REN |=位2;
P1DIR |=位3;
P1OUT |=位3;
//在 P1.2上启用中断
P1IE |= BIT2;//启用 P1.2上的中断
P1IES |= BIT2;//高电平到低电平转换时中断(下降沿)
P1IFG 并且=~BIT2;//清除 P1.1的任何挂起的中断标志
P1REN |=位2;
P1DIR |=位3;
P1OUT |=位3;
//在 P1.2上启用中断
P1IE |= BIT2;//启用 P1.2上的中断
P1IES |= BIT2;//高电平到低电平转换时中断(下降沿)
P1IFG 并且=~BIT2;//清除 P1.1的任何挂起的中断标志
}
void initTimer (void)
{
// TIMER0的配置
TA0CCR0 = 32;//持续 ms
TA0CTL = TASSEL_1 | MC_1 | TACLR | TAIE;// ACLK、计数模式、清除 TAR、启用中断
//__bis_SR_register (GIE);//随着中断进入 LPM0
}
void main (void)
{
stop_watchdog ();//停止看门狗计时器
SYSCFG2 |= USCIB0RMP;/*要更改默认的 I2C0引脚、需要执行此操作*/
SYSCFG3 |= USCIB1RMP;/*要更改默认的 I2C1引脚、需要执行此操作*/
initClock4.12.4C() 16MHz;
initTimer();
SYSCFG2 |= USCIB0RMP;/*要更改默认的 I2C0引脚、需要执行此操作*/
SYSCFG3 |= USCIB1RMP;/*要更改默认的 I2C1引脚、需要执行此操作*/
initClock4.12.4C() 16MHz;
initTimer();
system_up = timer_tick;// system_up (用于计算坞站接通时间)
start_watchdog ();
InitGPIO ();//Init GPIO
___ bis_SR_register (GIE);
start_watchdog ();
InitGPIO ();//Init GPIO
___ bis_SR_register (GIE);
while (1)
{
if (FAULT_TYPE == 3){
printf ("故障类型:%d\r\n"、fault_type);
FAULT_TYPE = 0;
}
if (FAULT_TYPE == 2){
printf ("故障类型 :%d\r\n"、fault_type);
FAULT_TYPE = 0;
}
if (fault_type =1){
printf ("故障类型 :%d\r\n"、fault_type);
FAULT_TYPE = 0;
}
if (FAULT_TYPE > 3){
FAULT_TYPE = 0;
}
printf ("故障类型:%d\r\n"、fault_type);
FAULT_TYPE = 0;
}
if (FAULT_TYPE == 2){
printf ("故障类型 :%d\r\n"、fault_type);
FAULT_TYPE = 0;
}
if (fault_type =1){
printf ("故障类型 :%d\r\n"、fault_type);
FAULT_TYPE = 0;
}
if (FAULT_TYPE > 3){
FAULT_TYPE = 0;
}
}
}
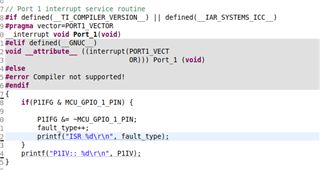
//端口1中断服务例程
#if defined (__TI_Compiler_version__)|| defined (__IAR_SYSTEMS_ICC__)
#pragma VECTOR=Port1_VECTOR
_interrupt void Port_1 (void)
#elif defined (_GNUC__)
void __attribute__((INTERRUPT (PORT1_VECT.
或))端口1 (空)
#else
错误编译器不受支持!
#endif
{
中频(P1IFG 和 MCU_GPIO_1_PIN)
{
P1IFG 且=~MCU_GPIO_1_PIN;
FAULT_TYPE++;
printf ("isr %d\r\n"、fault_type);
}
}
// Timer0_A3中断矢量(TAIV)处理程序
#if defined (__TI_Compiler_version__)|| defined (__IAR_SYSTEMS_ICC__)
#pragma VECTOR=TIMER0_A1_VECTOR
__interrupt void TIMER0_A1_ISR (void)
#elif defined (_GNUC__)
void __attribute__(((interrupt (TIMER0_A1_VECTOR)) TIMER0_A1_ISR (void)
#else
错误编译器不受支持!
#endif
{
开关(__EVEN_IN_RANGE (TA0IV、TA0IV_TAIFG))
{
案例 TA0IV_TAIFG://溢出
TIMER_TICK++;
TA0CCR0 = 32;//表示毫秒
休息;
案例 TA0IV_NONE://无中断
休息;
案例 TA0IV_TACCR1://未使用 CCR1
休息;
案例 TA0IV_TACCR2://未使用 CCR2
休息;
默认值:
休息;
}
}