Thread 中讨论的其他器件:SysConfig
我们似乎无法从 ROV 获取正确的调用栈。 我们尝试在 LAUNCHXL-1352P1上按原样运行此项目(simplelink_cc13x2_26x2_SDK_5_20_00_52\examples\rtos\CC1352P1_LAUNCHXL_drivers\empty)。
- Code Composer Studio 版本:10.4.0.00006
- TI Clang v1.3.0.LTS
- SimpleLink CC13x2 26x2 SDK 5.20.0.52
- SysConfig 1.8.2
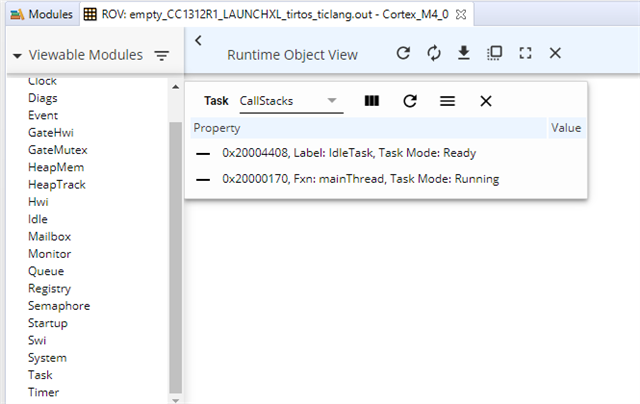
任务模块下的调用堆栈不会填充:

该工程会自动导入 TI-RTOS 的发布版本、因此我还尝试手动导入 TI-RTOS 的调试版本(simplelink_cc13x2_26x2_sdk_5_20_00_52\kernel\tirtos\builds\cc13x2_cc26x2\debug\ticlang)、并更改工程依赖项以指向该工程。 我得到相同的结果。
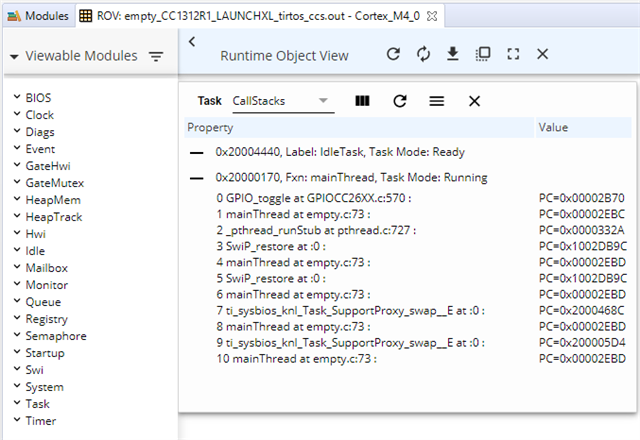
我们还尝试升级到最新的 CCS、SimpleLink 和 SysConfig、以使用新的 TI-RTOS7。 我们在同一 LAUNCHXL-1352P1上运行了此项目(simplelink_cc13xx_cc26xx_sdk_5_30_00_56\examples\rtos\CC1352P1_LAUNCHXL_drivers\empty\tirtos7\ticlang):
- Code Composer Studio 版本:11.0.0.00012
- TI Clang v1.3.0.LTS
- SimpleLink CC13xx 26xx SDK 5.30.0.56
- SysConfig 1.10.0
ROV 不显示任何启用的 RTOS 模块:
![]()
在 Debug 输出文件夹下生成的 syscfg_c.rov.xs 似乎启用了一些项目、以显示我们最感兴趣的模块(Hwi、Swi 和任务)。
/*
* ======== syscfg_c.rov.xs ========
* This file contains the information needed by the Runtime Object
* View (ROV) tool.
*
* Specifically, this file names the C-ROV implementation files declared
* by the modules that are part of the app's configuration. In the
* future this file will also contain a serialization of corresponding
* module configuration parameters which can be used by the ROV provided
* views.
*
* DO NOT EDIT - This file is generated by the SysConfig tool.
*/
var crovFiles = [
"ti/sysbios/BIOS.rov.js", /* /ti/sysbios/BIOS ROV support */
"ti/sysbios/family/arm/cc26xx/ClockSupport.rov.js", /* /ti/sysbios/family/arm/cc26xx/ClockSupport ROV support */
"ti/sysbios/family/arm/cc26xx/Timer.rov.js", /* /ti/sysbios/family/arm/cc26xx/Timer ROV support */
"ti/sysbios/family/arm/m3/Hwi.rov.js", /* /ti/sysbios/family/arm/m3/Hwi ROV support */
"ti/sysbios/gates/GateMutex.rov.js", /* /ti/sysbios/gates/GateMutex ROV support */
"ti/sysbios/heaps/HeapMem.rov.js", /* /ti/sysbios/heaps/HeapMem ROV support */
"ti/sysbios/knl/Clock.rov.js", /* /ti/sysbios/knl/Clock ROV support */
"ti/sysbios/knl/Event.rov.js", /* /ti/sysbios/knl/Event ROV support */
"ti/sysbios/knl/Idle.rov.js", /* /ti/sysbios/knl/Idle ROV support */
"ti/sysbios/knl/Mailbox.rov.js", /* /ti/sysbios/knl/Mailbox ROV support */
"ti/sysbios/knl/Semaphore.rov.js", /* /ti/sysbios/knl/Semaphore ROV support */
"ti/sysbios/knl/Swi.rov.js", /* /ti/sysbios/knl/Swi ROV support */
"ti/sysbios/knl/Task.rov.js", /* /ti/sysbios/knl/Task ROV support */
"ti/sysbios/runtime/SysMin.rov.js", /* /ti/sysbios/runtime/SysMin ROV support */
];
我有另一个活动线程(https://e2e.ti.com/support/wireless-connectivity/other-wireless-group/other-wireless/f/other-wireless-technologies-forum/1046567/cc1352p-ti-rtos-abort-assert-no-debug-info-hard-fault-only-after-flashing)、但在没有 ROV 的情况下、故障排除能力有限。 我们如何使 ROV 与任一工具链协同工作?