Other Parts Discussed in Thread: AWR6843AOP, AWR6843AOPEVM
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:AWR6843AOPEVM、AWR6843AOP 大家好!
我仅使用 awr6843aopevm (修订版 G)
我正在尝试使用 awr6843AOP 基于 ROS 的仿真,但遇到了这样的问题;

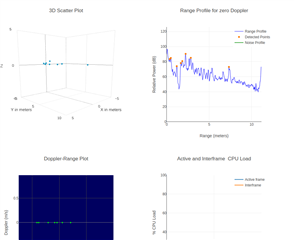
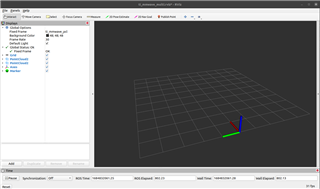
我在 rviz 仿真器中看不到任何输出。
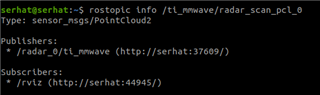
我遵循了这个网站的指示。 " dev.ti.com/.../node
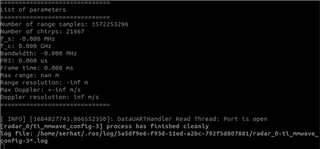
我仔细地按照网站上的指示进行操作。 我授予了端口权限。 我做了 catkin_make 操作。 除传感器启动外、所有配置参数均已完成。 我不明白为什么会出现此错误。 提前感谢您对此的任何评论。