请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LM5158 工具/软件:
我一直在研究有频繁故障报告的 SEPIC。 最终故障场景是 SW 和 PGND 之间的短路。

我确认了器件选择满足 Excel 设计工具的要求、并且在稳态下运行看起来不错。 但我注意到在 一些电路板上、软启动期间存在可重复的大振荡。
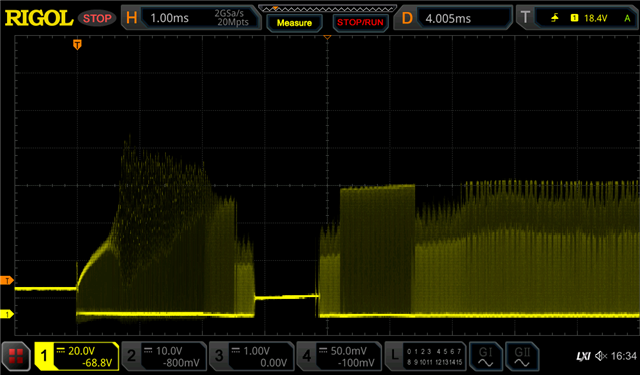
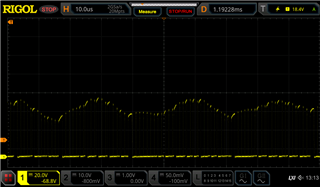
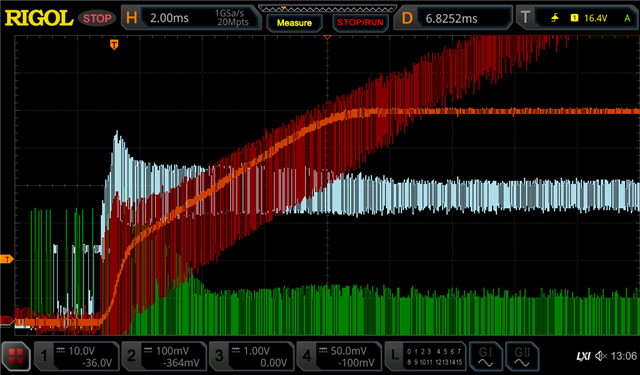
在这种情况下,切换停止,并在短时间后恢复,一切显然再次快乐。 停止周期并不总是存在、但振荡也存在。 以下是振荡的开始: 
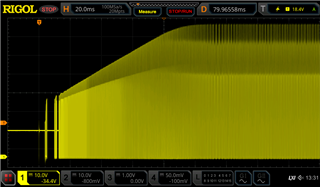
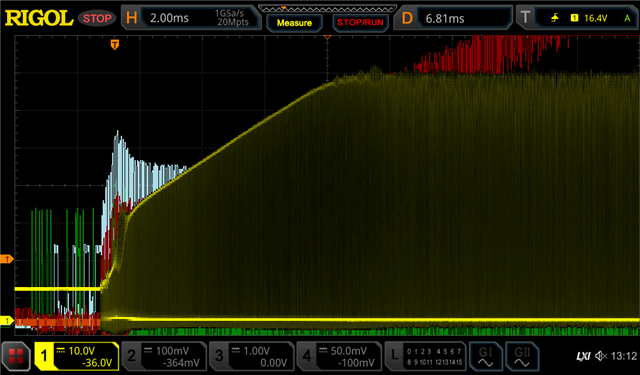
为便于比较、以下是从相同电路、相同布局但电路板不同部分启动的"良好"(对我来说):
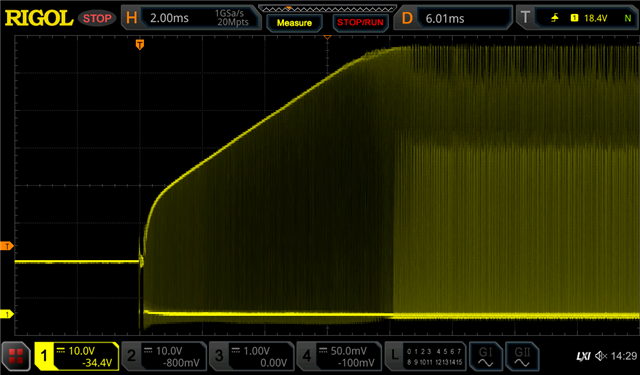
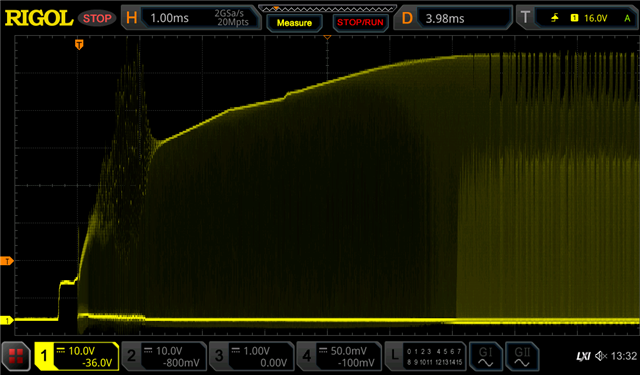
输入电压为14V 且稳定。 我将 LM5158的 EN 保持在低电平、然后在准备好捕获启动事件时释放 EN。
输出电压为56V。 除了空闲的 LTC4263及其去耦电容器之外、它上没有负载。 不过、在稳定状态下、输入电流仍会由36mA 上升一次。 该转换器设计用于200mA 输出电流。
开关频率设置为915kHz 并且有效。 在振荡期间、我可以看到开关占空比开始的差异很大。
软启动设置为10ms、但启动速度似乎始终快于该时间、介于5ms 和8ms 之间。
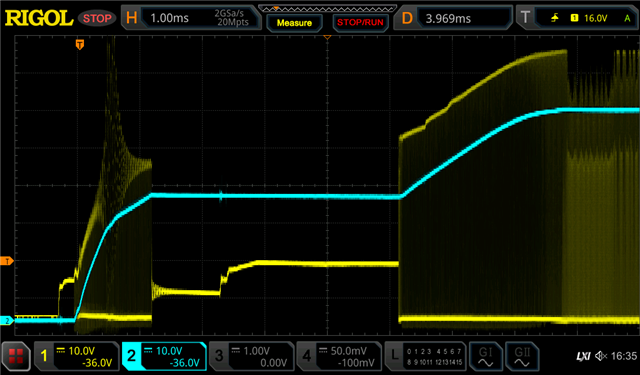
回想一下、LM5158的逐周期电流限制为3.26A。 电感器的饱和电流为8A。
最大 SW 电压为83V、在正常运行(14V+56V=70V)时未超过该电压、但在这些振荡期间也是如此。
振荡频率略低于10kHz。
我想一些噪声会进入反馈环路、但 SEPIC 特性非常复杂、我无法缩小潜在原因的范围。 我想知道:
- 这是一个已知现象吗?
- 在这个频率下、什么可能谐振? 和输入电感器之间放置一个滤波器? 但开关每个周期都会断开环路。 较低的输出电容和输出电感器? 但二极管必须具有有意义的反向导通吗?
- 在4.15kHz 的补偿环路带宽下、它是否应该衰减该振荡、因此不起作用?
- 这看起来可能是由不良控制引起的、还是 发生了更重要的事情?