请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TPS546D24AEVM 主题中讨论的其他器件: TPS546D24A、 TPS546D24
你(们)好。
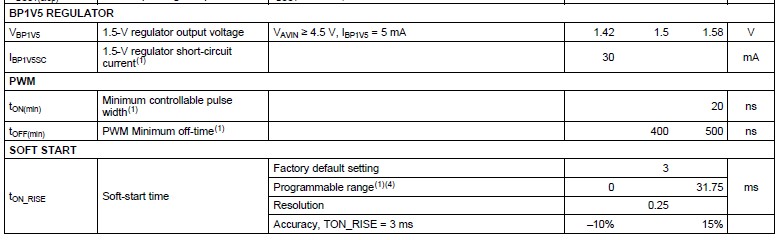
TPS546D24AEVM 电路板的输出电压是否 可以高于1.5V? EVM 板上的电感器值为150nH、电流为80A 时、输出是否支持0.6V 至5.5V?
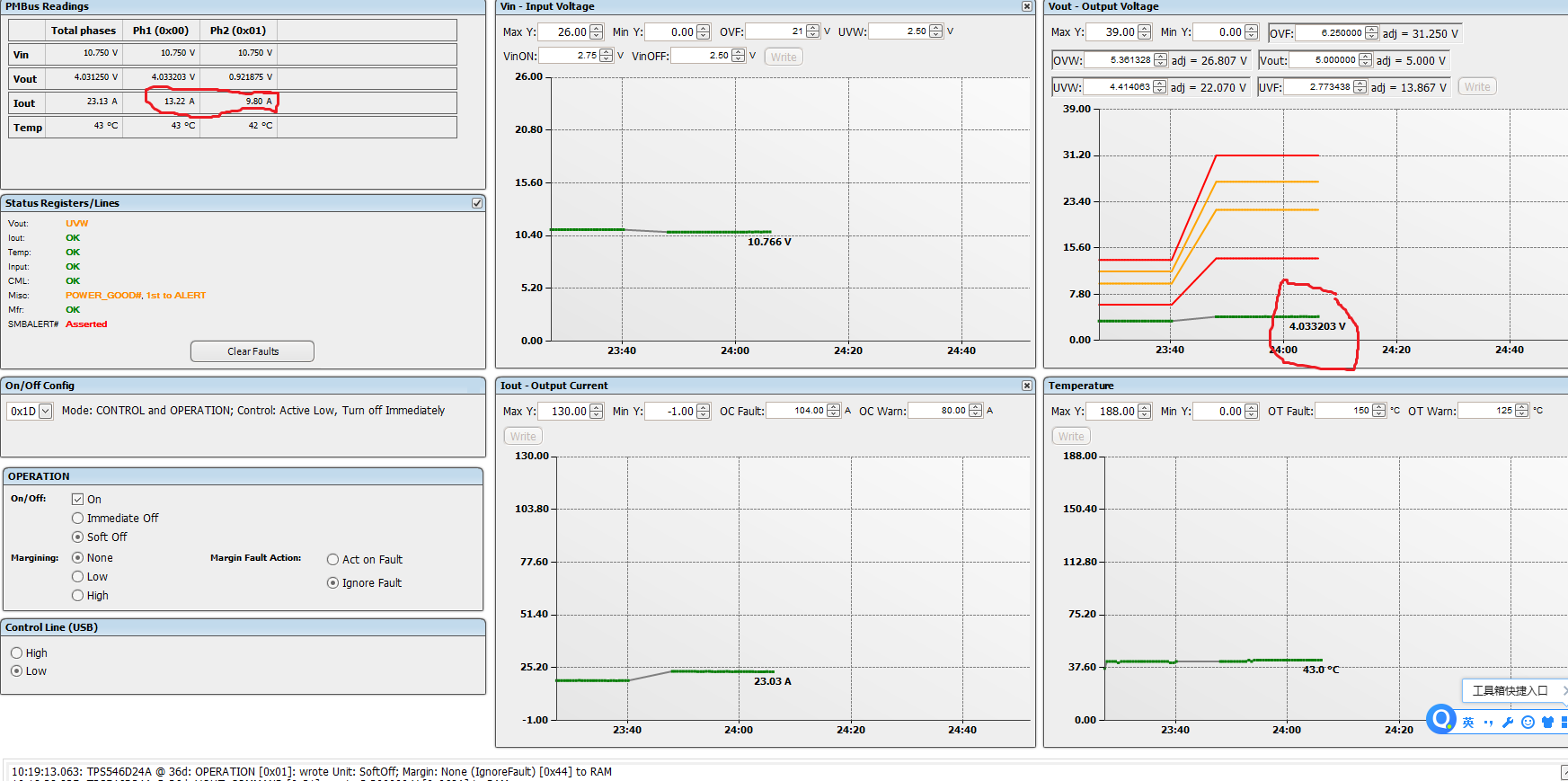
输出电压时、我将看到该电流。 有 注释:您必须输入介于0到1.5之间的数字。

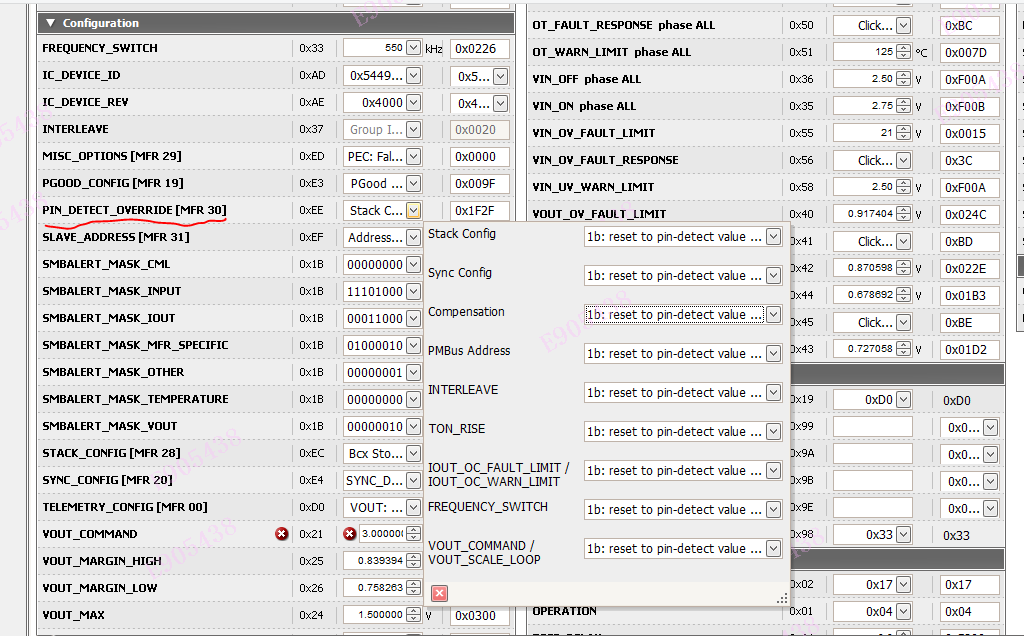
我更改了引脚搭接。 但没有发生任何事情。 如何将这些通信设置为 EEPROM?
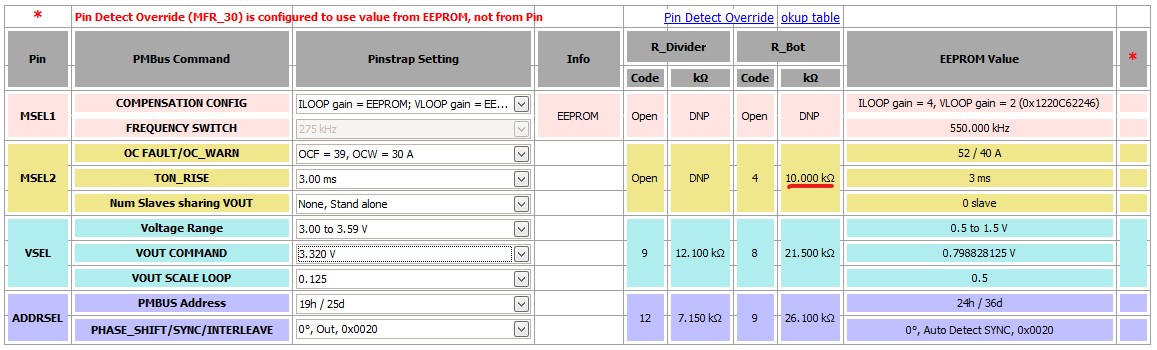
这是引脚束带。
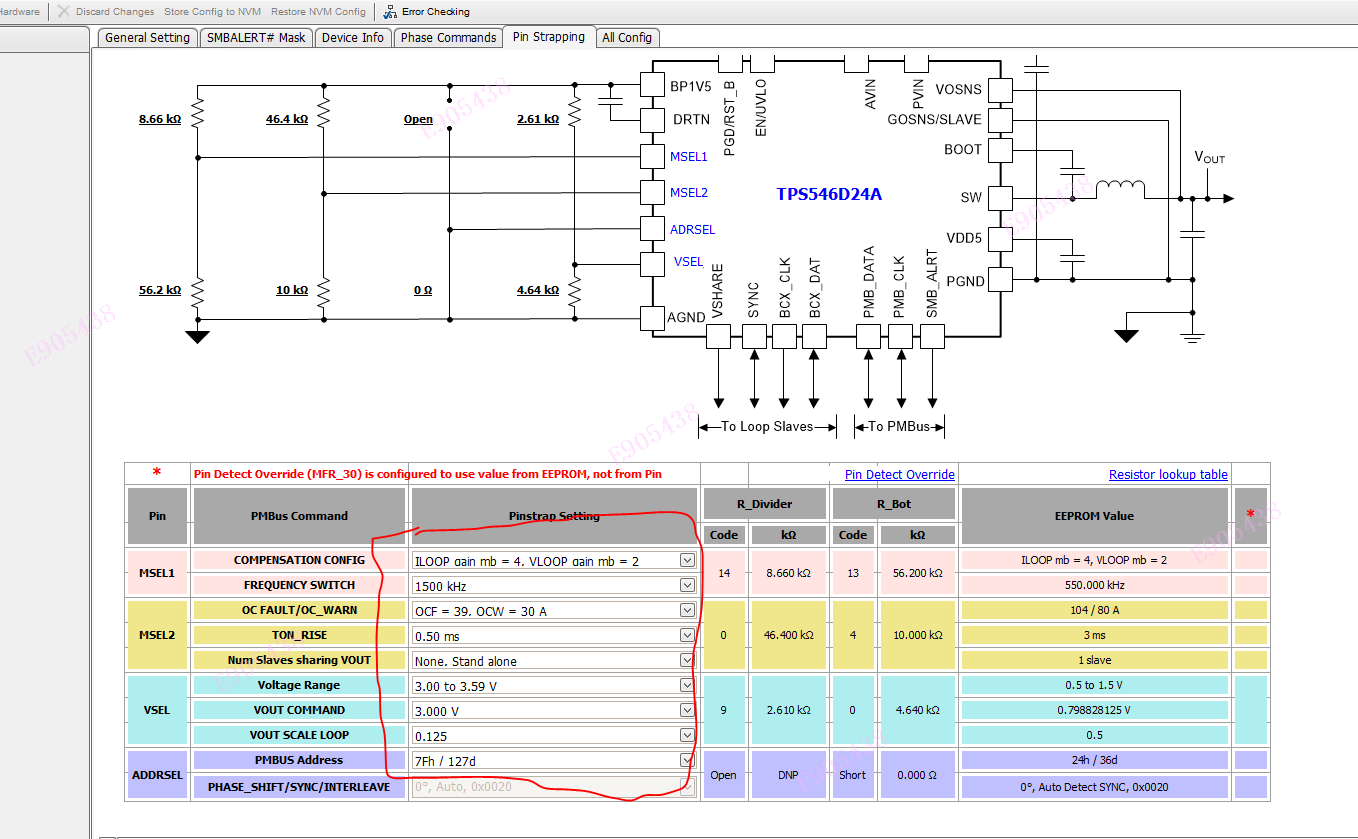
PIN_DETK_OVERRIDE 被设定为0x1F2F。
此致、
Ricardo