请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TPS546D24A 大家好、
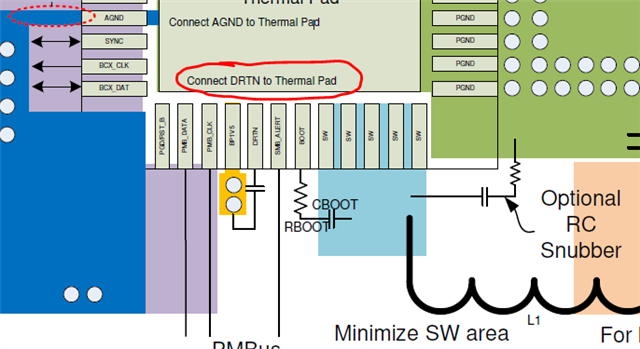
您能不能帮助检查该原理图是否有任何问题、
1、 如果地址引脚悬空、将分配什么地址? 0x24?
2.他们能否将 Avin 和 PVIN 分开并为 Avin 提供3.3V 电压? 过低?

大家好、
您能不能帮助检查该原理图是否有任何问题、
1、 如果地址引脚悬空、将分配什么地址? 0x24?
2.他们能否将 Avin 和 PVIN 分开并为 Avin 提供3.3V 电压? 过低?