Other Parts Discussed in Thread: UC3843, UC2843, UCD3138
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UC3843 主题中讨论的其他器件: UC2843、 UCD3138
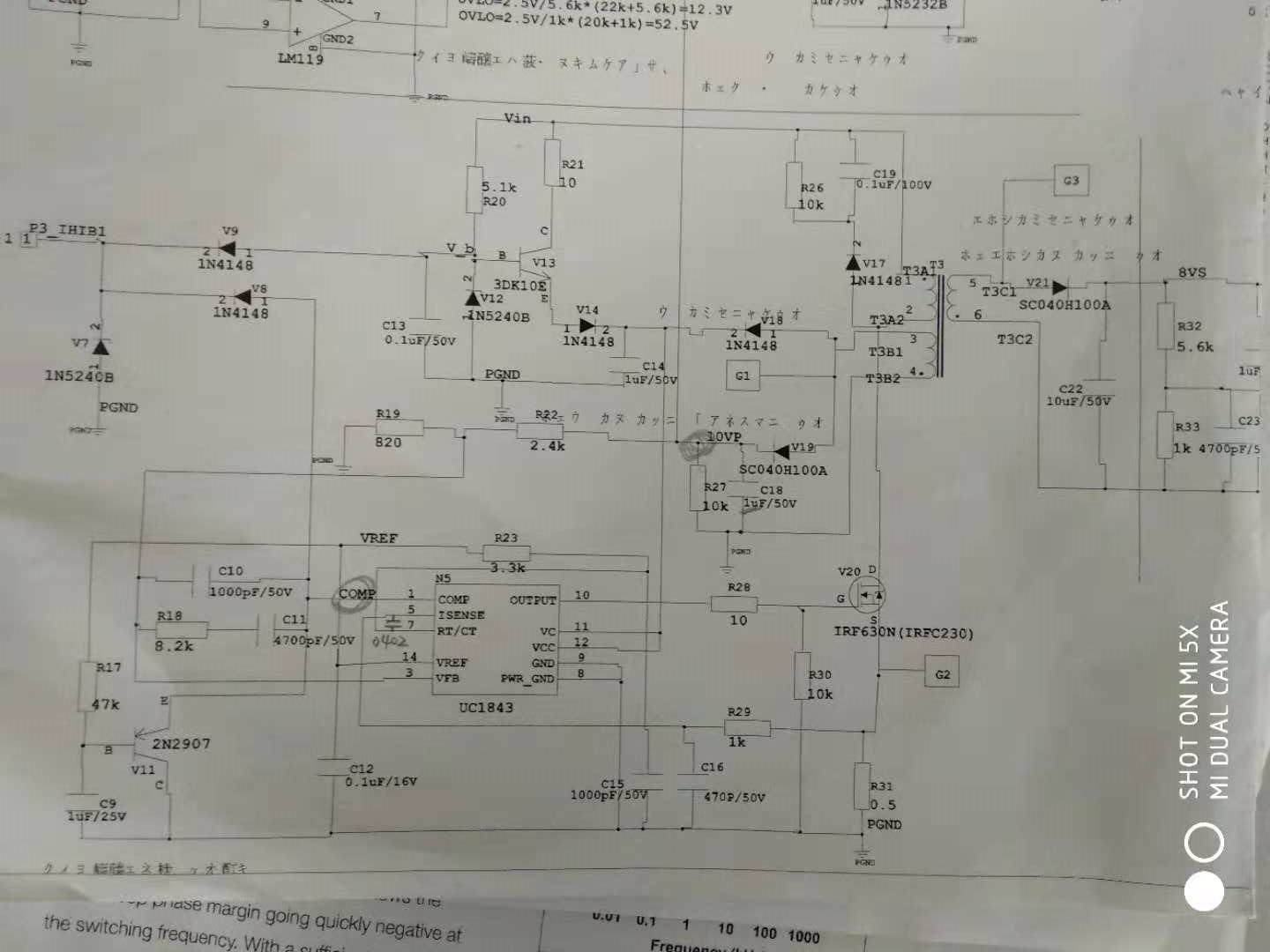
我构建了基于 UC3843的反激式电路。
当输入电压达到40V 时、占空比不稳定、这种现象突然变得大而小、介于0.2和0.25之间。
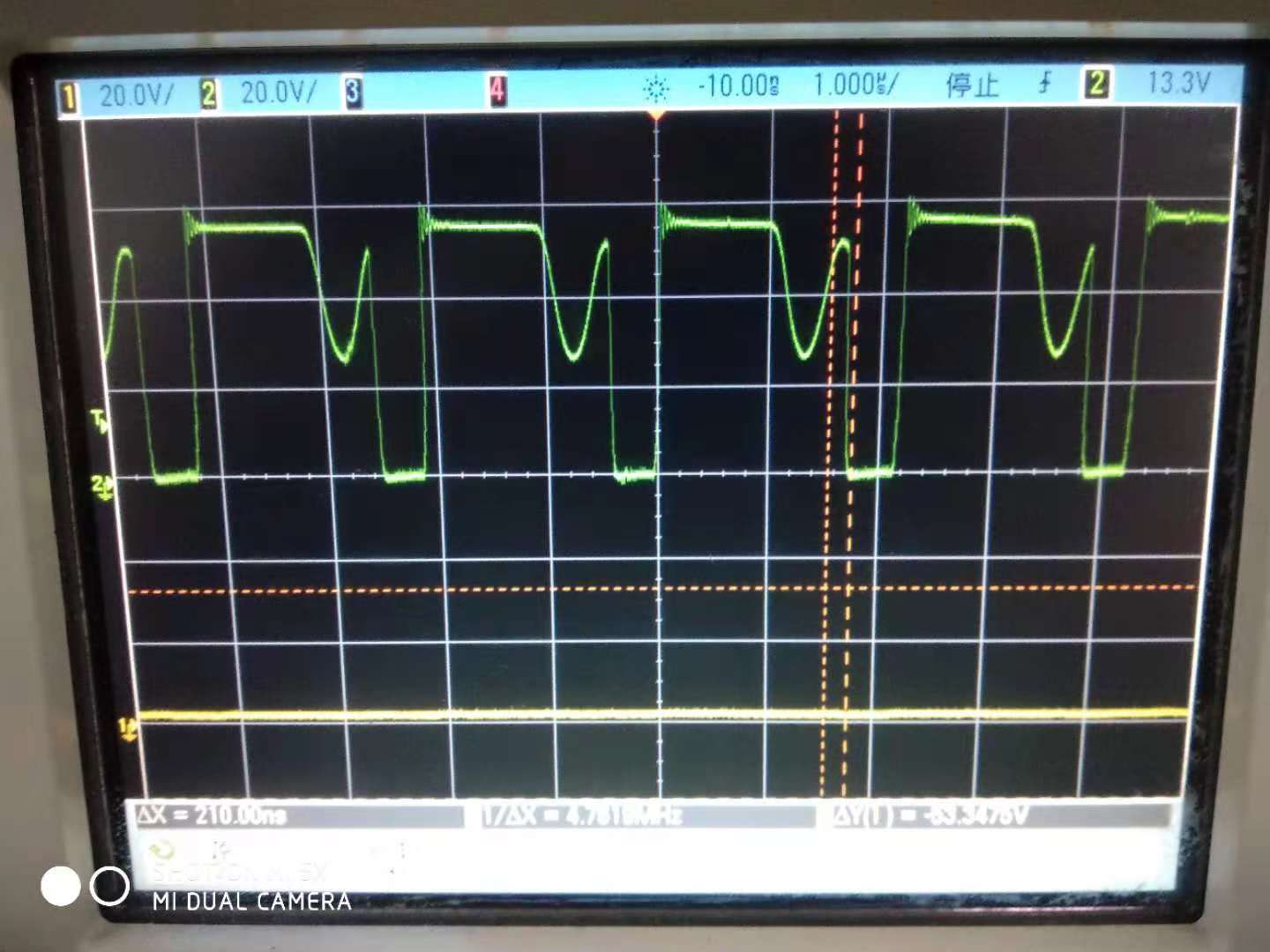
如下图所示、MOS 管漏源电压波形。
我测试了此时的伯德图,如下图:μ A

此时、相补角为51度、增益裕度为-33dB。 环路参数仍然很好。
我不知道是什么导致了这种情况? 环路稳定、但实际驱动波 D 不稳定。