请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UCD3138 你好
最近、我学习了 TI 的应用文档"UCD3138控制理论"。 我有一些问题要问您。
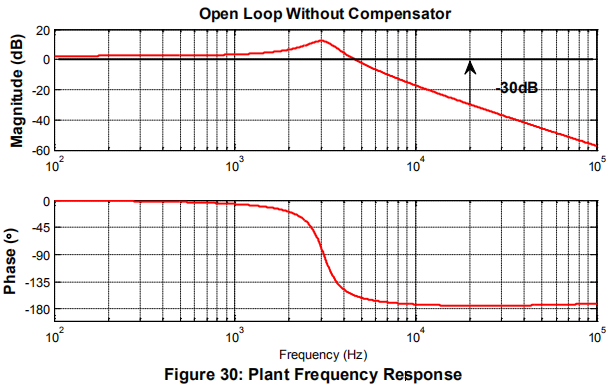
第一个问题,即文件第十页的第十页,"金伯利进程对频率响应的影响"。

我在文档中计算了案例、我认为图标注释的零位置不准确。
根据文档中建议的等式48和49、我计算出两个零点的频率应为 fz1=2kHz、fz2=36kHz。
从图中可以看出、蓝色曲线的相位分别为-45度和+45度、频率近似为。
等于 fz1=2kHz、fz2=36kHz。 3kHz 和20kHz 位置不是黑圈。
我认为图中零点的表示只是一个原理图、但不准确。 图11和12也存在同样的问题。
不知道我的理解是正确还是错误?
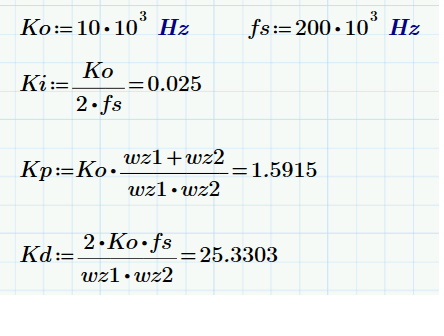
第二个问题是、当我根据文档中给出的公式48和49检查图11 ki=0.216的情况时、
我发现这两个零点是虚数。 Fz1 =(19-19i) kHz、fz2 =(19 + 19i) kHz。 当 ki=0.0216、fz1=2kHz、fz2=36kHz 时、两个零点都是实数。
我尝试使用"共轭零"的概念来理解 ki = 0.216、fz1和 fz2获得虚幻解决方案。
我计算出 fz1和 fz2的振幅为27kHz、从图中可以看出、在27kHz 时、它恰好是相位0度、即相位增加90度。
当我的 ki=0.216时、fz1和 fz2是虚数解决方案。 我还可以确定我是否可以用“共轭零”的概念来解释它。 原因是什么? 在同一情况下,科威特第纳尔也增加了10倍。

我期待您的指导。