

Other Parts Discussed in Thread: UCD3138
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UCD3138 您好、先生:
我们在逐次逼近模式下使用前端0 (EADC 和 DAC 一起)、同时我们发现了一些时序问题;
当在 V33上升之前或期间 EAP0/EAN0上存在偏置电压(大约1V)时、最终 的 SAR 计算始终为零、您知道原因吗? 如果偏置电压不可避免、如何在这种情况下使用 SAR? 非常感谢;
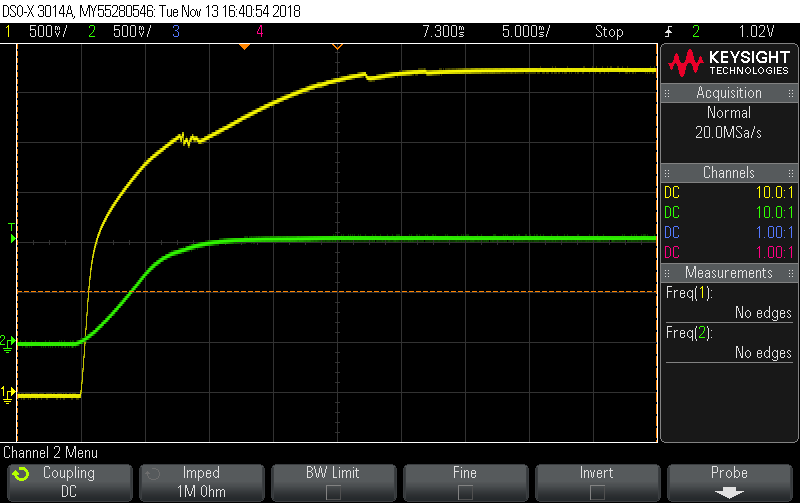
已连接波形;CH1:V33、CH2:EAP0/EAN0;
非常感谢;
