This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
Other Parts Discussed in Thread: UCC21520
https://e2e.ti.com/support/power-management-group/power-management/f/power-management-forum/930831/faq-ucc21520-what-do-i-need-to-know-about-power-up-delay-when-designing-a-driver-bootstrap-supply
在设计驱动器自举电源时、我需要了解哪些有关上电延迟的信息?
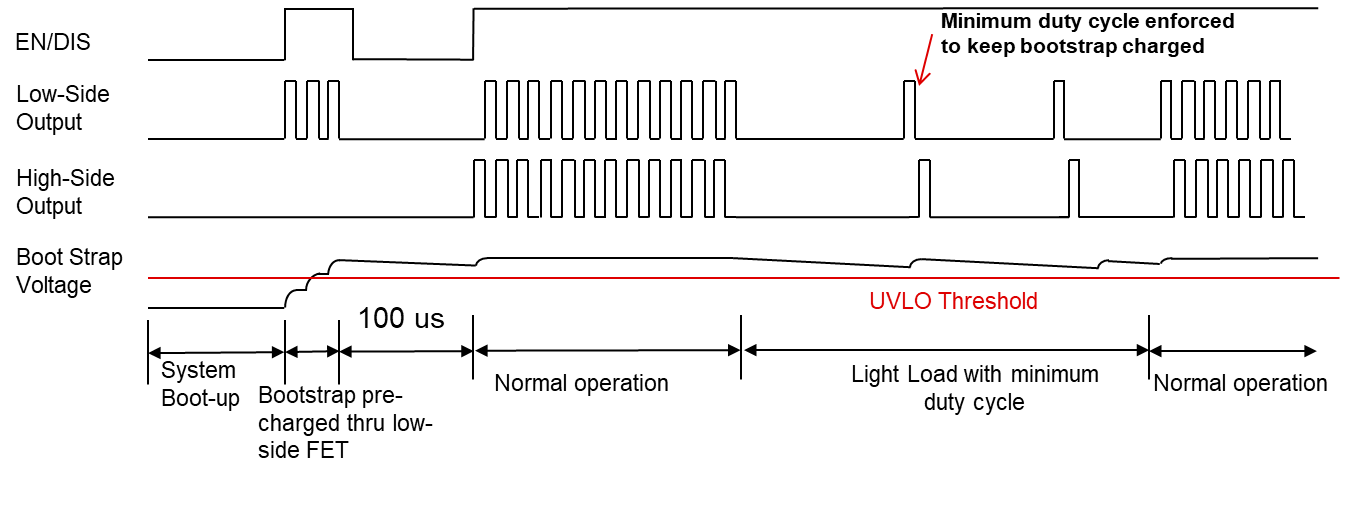
最小启动时间是设计高能效且快速的电路的关键因素。 启动时间受上电延迟的限制、上电延迟定义为驱动器启用到第一个输出的时间。 与许多电路一样、自举电源的最小上电延迟由所使用的驱动器决定、可在数据表中找到。 例如、UCC21520的典型 VDDA 加电延迟时间为50us。 本质上、自举电源在高侧输出上具有额外的延迟、因为在从 VDDA 到 VSSA 的电源电压达到驱动器的 UVLO 电平之前、驱动器的高侧输出不会被启用。 然后、总上电延迟是 CBoot 所需的时间(图 1) 1)达到 UVLO 电平加上驱动器的典型 VDDA 上电延迟。 图中显示了仿真上电延迟波形。 2、由于驱动器在10us 时启用、电容器开始充电。 然后、在电容器电压超过8V UVLO 阈值50us 后、驱动器的输出开始响应。
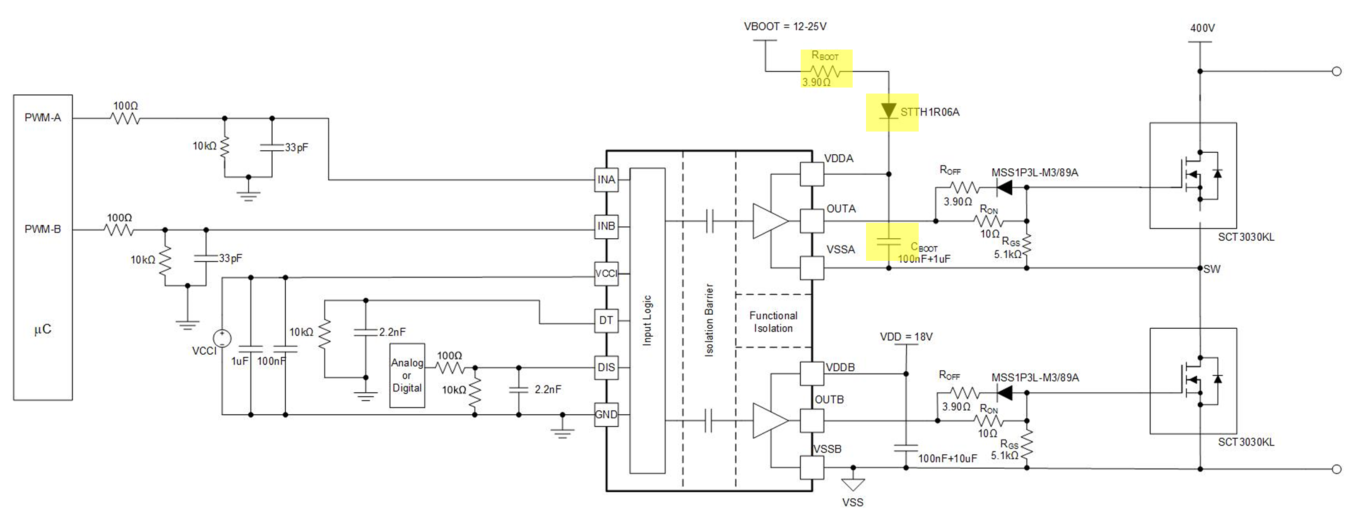
图1:突出显示了自举组件的自举电源原理图
图2:UCC21520的典型上电延迟。 C_BOOT = 1.1uF、R_BOOT = 2.2 Ω、频率= 1MHz、死区时间= 100ns、占空比= 50%、V_BOOT = 18V
虽然无法真正控制驱动器的 VDDA 上电延迟、但与自举电容器充电相关的延迟可以通过两种方式加以限制。 其中第一个也是最有效的方法是包含一个已编程的启动序列、如图所示。 3.这样一个序列使得自举电容器能够在实际需要驱动器之前进行充电、这是由于计划了延迟。 这减少了上电延迟的负面影响。
图3:示例预充电序列
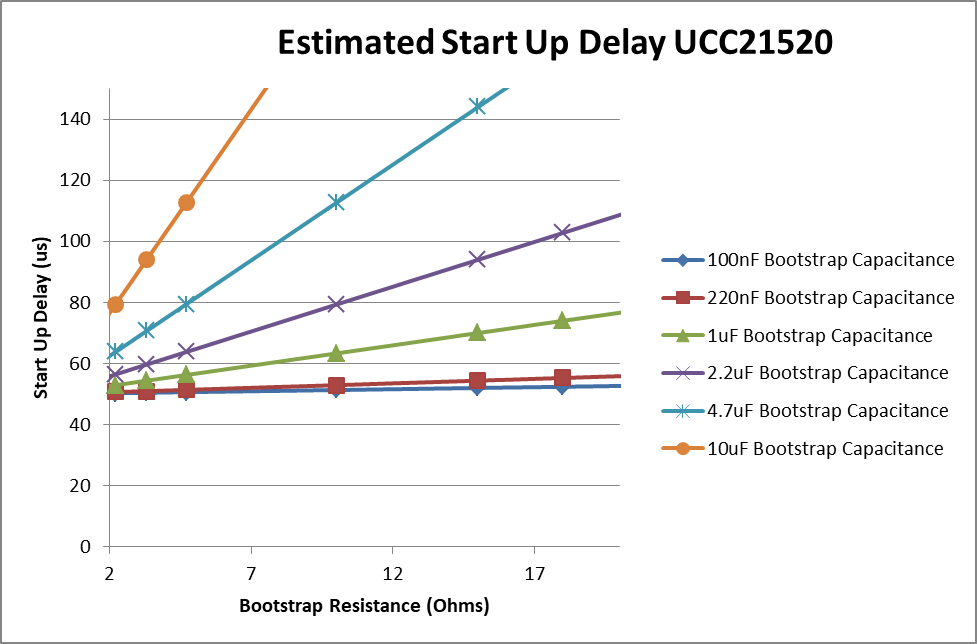
第二种方法是调整自举组件。 自举电容器的充电时间直接受开关频率、死区时间、占空比、UVLO 电平、自举电阻、 和自举电容。 此关系如图 不过、其中许多因素是由应用程序预先确定的。 唯一可以轻松调整的因素是 RBoot 和 CBoot 的值。 通过最大程度地减小自举电阻和电容、可以减少上电延迟。 问题在于、这两个组件都对其他因素有很大影响、包括高侧电源 dV/dt (https://e2e.ti.com/support/power-management/f/196/t/927826)和自举电容器过充。 通常、这两个因素要求自举电容和/或电阻增加。 由于这场冲突,必须找到平衡。 通常、限制自举电容器过充和高侧电源 dV/dt 更重要、因此应以满足这些要求的最小值选择自举组件。
图4:CBoot 和 RBoot 对加电延迟的影响
最佳做法是使用图中所示的预充电序列、同时实施这两种方法来控制上电延迟。 同时仍将 RBoot 和 CBoot 保持在最低可接受值、以满足其他设计要求。 将这两种方法结合使用时、可以最大限度地缩短自举电容器充电时间、并通过对电容器进行预充电来规划延迟。 如果您有任何疑问、请单击黄色的"询问相关问题"按钮、我们将与您联系!