This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
Other Parts Discussed in Thread: TLV431, UCC28C56H
https://e2e.ti.com/support/power-management-group/power-management/f/power-management-forum/1285653/ucc28c56h-power-transfer-function
大家好、
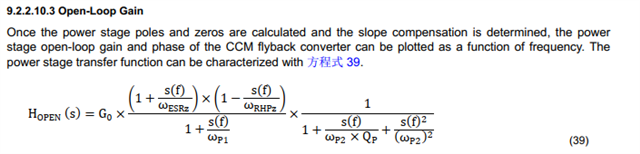
数据表中此公式中 s (f)的具体多项式是什么?
您能否根据数据表中图9-3的电路为我提供完整的功率传递函数?
谢谢
利利连
尊敬的 Lillian:
S (f)表示"S"取决于频率。 S=j*w 您可以将其视为"S"。
谢谢你。
您好,Manuel,í a
感谢您的答复。
您可以帮助解答第二个问题吗、提供基于数据表中图9-3的电路的完整功率传递函数?
我会处理这个问题、今天很快就会回来与您联系。
谢谢、期待您的回复。
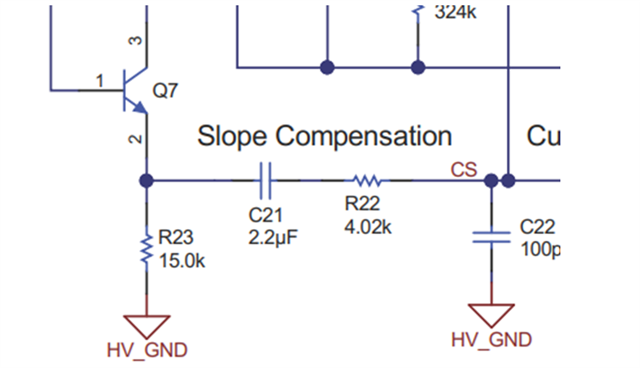
与数据表中的典型应用相比、还有一个问题、UCC28C56EVM 原理图中的斜率补偿环路添加了电阻器 R23。 该电阻器的功能是什么? 它将如何影响系统的开环传递函数?
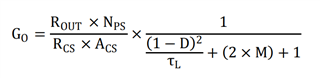
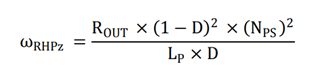
ROUT:反激式转换器的电阻负载。
NPS:变压器一次侧与二次侧的匝数比
RCS:电流检测电阻。
ACS:IC 的电流检测增益。 请参阅数据表的电气特性。
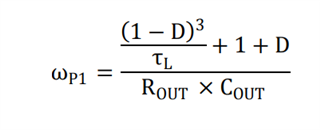
D:最大占空比、请查看数据表中的公式20。
T_L: 检查数据表的公式21。
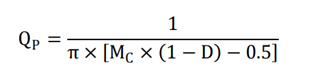
M: 检查数据表的公式21。
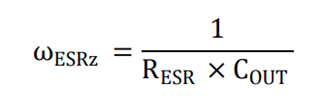
RESR:输出电容器的等效串联电阻。
COUT:输出电容。
LP:从初级侧看到的变压器磁化电感。
考虑最大占空比。
在这里、Qp 的理想值为 Qp=1、具体取决于斜率补偿的设计。 请阅读第9.2.2.10.2节了解更多详细信息。
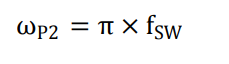
最后、您可以替换开环增益传递函数中的所有这些值:
Hi Lillian、R23是一个下拉电阻器、可确保 Q7在它不导通时关断。
您好、Manuel:
感谢您的回复!
另一个问题是调试期间、我发现当电源输入电压被调整时、OUT 输出的控制频率会发生变化、永远不会达到设定值。 RTCT 在外部连接至15k 和1000p。 根据数据表 P16、开关频率应在110kHz 左右。 当我的输入电压是200V 时、示波器的开关频率大约是30kHz、当输入电压增加到600V 时、示波器的开关频率大约是60kHz。 上述情况在输出轻负载时发生。 当输出重负载时、开关信号将在几个周期内丢失、导致高频变压器发生哨音。 您是否对上述两个问题有任何解决方案、或解释它们出现的原因?
你好,Lilian。
我正在处理这个问题、今天很快就会回来与您联系。
尊敬的 Lilian:
请分享您的 原理图、 我可以为您提供所需的支持。 此外、如果可能、在示波器中分享用于显示您提到的问题的任何波形。
您好,Maunel,
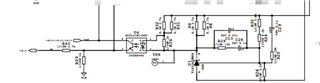
请在此处查看原理图。
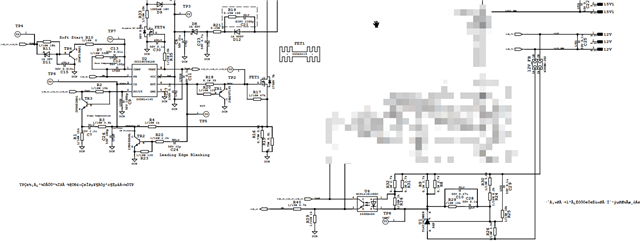
测试波形如下:当输入高电压时、频率低于预期、周期不稳定;关闭电源时、开关频率和占空比符合预期(scope251)
如果可能、您能否共享您的邮件地址? 我可以通过邮件与您联系。
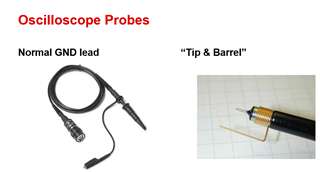
1.首先、请确认:您显示的波形取自 IC 的 OUT-GND? 仅作为一个提示:我建议在使用示波器探头测量输出信号时使用尖端和接地筒连接器(见下文)。 该连接器允许以最小的寄生电感进行测量、并可提高测量的精度。 每个波形都是在什么条件下获取的? 负载? 低电压、高电压?
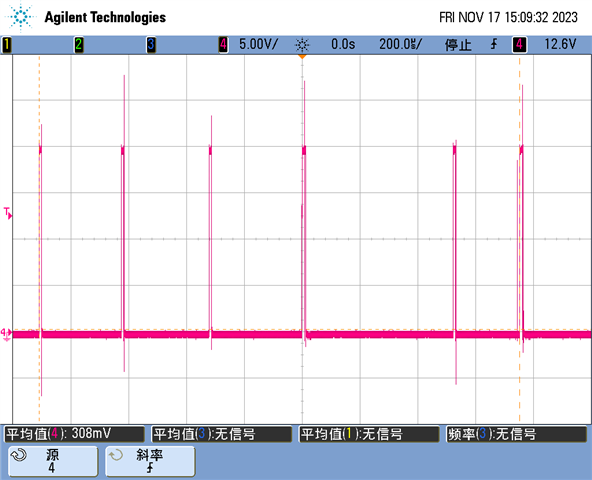
2.关于前两个波形:
-在轻负载条件下,反激式转换器以最短接通时间运行,这就是为什么输出驱动信号处会出现最小脉冲的原因。
-这些驱动信号的开关频率为几 KHz (<5kHz),与您的 RT/CT 值不匹配。 获取这些驱动信号时、请在 RTCT、COM 和 ISense 引脚上放置示波器探头。 这些信号将有助于进行调试、并为开关频率不匹配问题找到答案。
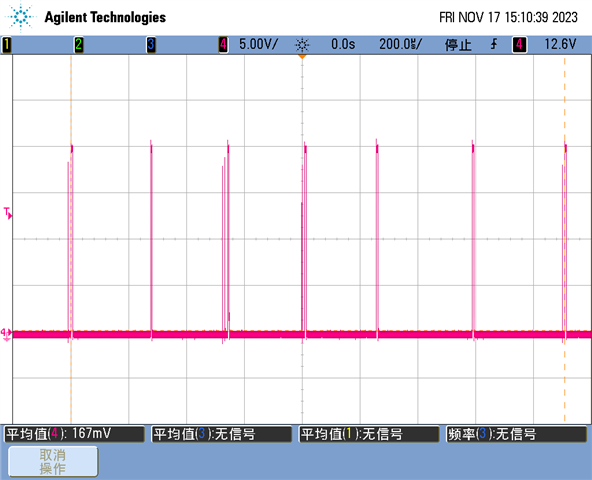
3.关于第三个波形:
- 由于 Vdd 达到 UVLO_OFF=15.5V ,输出信号关闭。 这可能意味着变压器的辅助绕组没有向 Vcc 提供足够的电流来运行 IC。 而这种情况可能发生在轻负载条件下。
-这些脉冲/驱动信号的频率要高得多。 请在此处确认负载条件。
我们 从 OUT-GND 获取波形、但与上述波形相同、似乎都能很好地应用 RTCT、COM 和 ISense 引脚。
2.我们还发现一个奇怪的考虑:
我们再次在 EVM 板上进行了测试。 如果我们使用普通的350V 示波器探头、则会发出轻微的口哨声。 如果我们使用高电压差分隔离探针、电路板上显然会发出口哨声。 您是否能够在 EVM 中再次出现此情况?
U4位置是 TLV431。 我们发现、如果我们将探头钳制在 TP8位置进行测试、就不会有啸声、但频率会略低于设定值。 但是、如果我们移除探头、将会有啸声、频率将变得不稳定。
此外、我们将 C10处的 LMCC 电容器替换为一个钽电容器。 原始的 Vout=12.9V 将变为11.9V。 看来补偿已经改变了。 请帮助确认此现象的原因。 最后、您能否提供 SSR 模式的设计说明?
您可以将其发送至我的邮箱:lillian-liu7@ti.com
-对于 Out-GND 测量,我建议使用单个探头与 尖端和接地筒 连接器(请见下方)。 您可以将探头直接连接到 OUT-GND 引脚、从而获得更高的精度并避免任何 寄生元件。
-您是否正在使用 UCC28C56EVM? 我在原理图中未看到任何 U4 (TLV431)或 TP8 (请参阅下文)。 另外、对于125V<Vin<1000V、此 EVM 的输出电压 Vout 为15.2。 请确认您要评估哪个 EVM。
-我不明白最后一个部分提到 SSR 模式设计说明? 您能解释一下 SSR 吗?
高手动、
谢谢。
我确信我们都使用了 尖端和接地筒 要测试的连接器。
对于下面的这一部分,我们在 EVM 上进行了相应操作。
"我们再次在 EVM 板上进行了测试。 如果我们使用普通的350V 示波器探头、则会发出轻微的口哨声。 如果我们使用高电压差分隔离探针、电路板上显然会发出口哨声。 您是否能够在 EVM 中再次出现此问题?…"
下面是我们在 客户板上执行的操作。
此外、我们将 C10处的 LMCC 电容器替换为一个钽电容器。 原始的 Vout=12.9V 将变为11.9V。 看来补偿已经改变了。 请帮助确认此现象的原因。
这个问题现在很紧急、可以帮您先检查一下吗?
Lillian 您好:
1.在测试时 输出-接地 驱动信号、您可以使用普通的示波器探头、无需使用差分探头。 探测信号波形时会发出轻微的口哨声、因为当来自探头的耦合时、它们更容易被噪声察觉。
2.在 UCC28C56EVM-066- UCC28C56H 的 EVM 中,没有 U4-TLV431。 我在您的原理图中找到的唯一 TLV431、它具有 U1的指示符(如下所示)。 进行 TP8探查时要小心。 耦合可能会影响光耦合器二极管的正向电流、然后改变 IC 的反馈电流、再改变补偿环路和 IC 的工作频率。 请验证 U1-TLV431的连接是否正确、在进行那里的探测时一定要温柔一些。 此器件会直接影响您的控制环路。
3.钽电容是电解电容,其谐振频率低于陶瓷电容。 这种变化可能会影响高频下电容器的低阻抗、然后影响补偿传递函数。 我建议在原理图中为 C10使用陶瓷电容器。
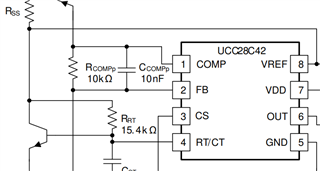
1.补偿器零点设计:考虑到 BW = FSW/10、C28和 R29具有良好的值。 然而、与 C28相比、C10应非常低、以添加高频极点、补偿补偿补偿补偿器零点的增益。 我建议使用 C10=C28/10=10nF。
3.补偿器极点的设计:该极点的位置取决于 farez/frhpz ,以最低者为准(见以下公式)。 将补偿器极点 fcompp 设置为这两个值中的最低值。 请注意、您需要并联 Rcomp 和 Ccomp (见下文)。 那么它看起来不是这样的。 您可以开始选择 Rcomp=10k Ω、然后使用以下公式计算 Compp。
更多详细信息、请参阅数据表的第9.2.2.10节。