请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:UCD3138 工具与软件:
您好!
我正在寻找"合适"的数字控制器、以用于标题中列出的应用(以及下文所述)、并希望 深入了解 UCD3138是否适合解决方案、或者 C2000系列控制器是否更适合。
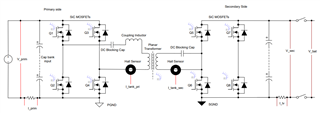
此转换器将包含交错、双向双有源电桥转换器、每个转换器由一个单独的 UCD3138或 C2000 MCU 控制并采用 SPS 调制运行。 为了减少常见负载所见的纹波电流、转换器将在它们之间发生相移。 此外、转换器应该能够智能地"切"相(作为负载的函数)、以保持高系统效率。
此外、UCD3138是否能够实现扩展相移调制?
谢谢