请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
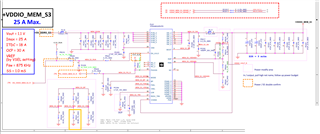
器件型号:TPS548D22 工具与软件:
您好、先生、
我有设计规格
Vin =5V、 Vout=1.1V、 Iout=30A、FSEL PR231设置90k9
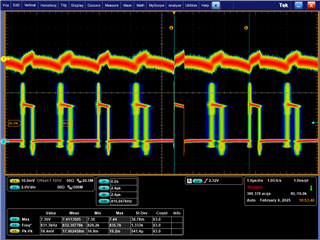
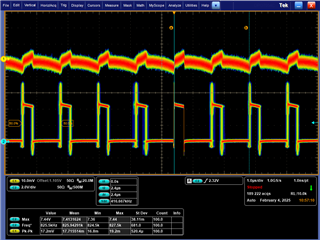
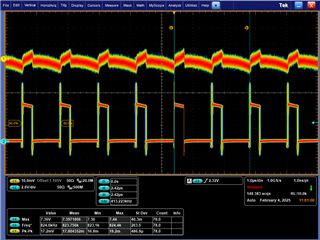
开关频率在高负载时不稳定,它看起来像亚汉莫尼克奥斯克利特?
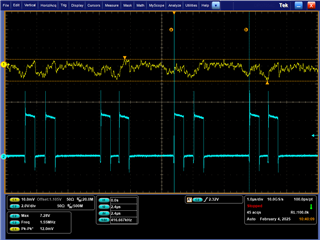
我将电阻 PR231调节到75k,60k9和47k5,开关频率稳定,但具有不同的喷射器水平。
您能否提供用于计算此情况的公式。 谢谢。
(从到下、75k、60k9、47k5)