请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM6442 主题:SysConfig 中讨论的其他器件
工具/软件:
您好 TI 专家
这是我的配置
1 - 2 倍于 M4F 的 MCPI 控制器
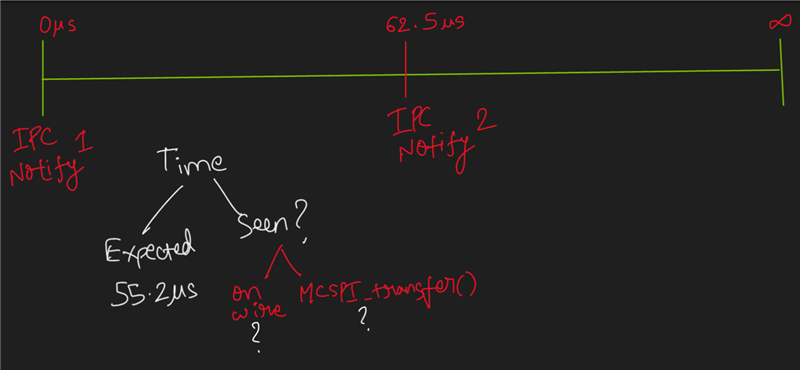
2-每 62.5us、M4F 将从 R5F00 接收 IPCNotify
4 每个 MCSPI 需要 在每个 IPCNotify 上传输 22 字节的唯一数据
5-SCLK 为 10MHz
7 - MCSPI0 是双向的、在传输结束时、M4F 需要处理来自 MSCPI0 外设的数据
6-两个 MCSPI 必须在下一个 IPCNotify 之前完成传输、MCSPI0 也需要完成数据处理
8-我已经使用 HLD、中断驱动和非阻塞配置了两个 MCSPI。
如果我们做粗略计算,
22*8 = 176bits * 0.1us = 17.6us + CS enable(估计为 5us)+ Disable (估计为 5s)= 27.6us。
即使有阻塞,我们也应该能够在 55.2 μ s 内完成传输
作为非阻塞、 MSCPI1 可以在 MCSPI0 传输时开始 传输、因此它应该有足够的时间来完成两次传输
到目前为止,我还不能让 MSCPI 在 62.5us 内完成传输
是否有任何可加快 MSCPI 传输速度的配置/设置
谢谢你
Alan I