请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:SK-AM62-LP 主题:TCAN1043 中讨论的其他器件
工具/软件:
您好、
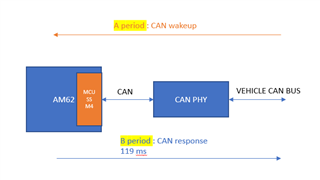
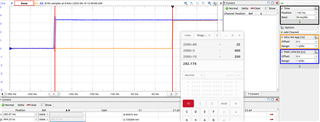
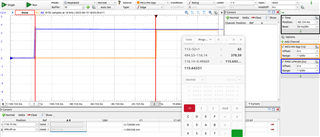
我们的客户要求我们产品从唤醒到发出 CAN 数据包的时间小于 300ms、
我们的实际测试约为 480ms。
测试 M4F 内核的启动并发送 CAN 数据包需要 119ms 时间、
这意味着 TI AM62 芯片需要 360ms 的时间来唤醒和启动 M4F 内核。
我的问题是如何在本例中缩短 360ms 的时间?