

Thread:TDA4VM 中讨论的其他器件
工具/软件:
您好:
目前、我们正在将 AR0234 传感器 (Bayer - GRBG10) 与 TDA4VM 进行移植。 我们已经完成了基本调优、可以获得良好的预览。 但我在连接两个摄像头时遇到了问题。 连接两个摄像头时、我在一个摄像头 (J19) 中无法获得正确的流式传输、在另一个摄像头 (J18) 中、我可以获得正确的流式传输。 下面是 我已经执行的步骤。
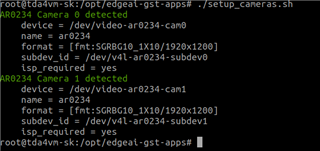
1.我运行了用于 media-ctrl 链接的 setup_camera.sh 脚本。 (请注意,camera0 连接到 J18、camera1 连接到 J19)
2.只有连接一个摄像头时(在 J18 和 J19 连接器中)、我才能获得正确的流。
3.连接两个摄像头后、可以在 J18 连接器中获得正确的流。 (请注意,J19 摄像头未进行流式传输)。
gst_debug=tiovxisp:1 gst-launch-1.0 v4l2src device=/dev/video-ar0234-cam0 io-mode=dmabuf-import! 视频/x-Bayer、宽度=1920、高度=1200、帧速率=32/1、格式=grbg10! tiovxisp SINK_0:::device=/dev/v4l-ar0234-subdev0 sensor-name=“sensor_AR0234" dcc-isp-file=/opt/imaging/ar0234/linear/7th/dcc_viss.bin“ dcc-isp-file=/opt/imaging/ar0234/linear/7th/dcc_viss.bin SINK_0::ae-MODE=0 SINK_0::dcc-2a-file=/opt/imaging/ar0234/linear/7th/dcc_2a.bin format-mb=9! video/x-raw、格式=NV12、宽度=1920、高度=1200、帧速率=60/1! kmssink driver-name=tidss sync=false
3.连接两个摄像头时、J19 连接器中无法获得正确的流。 (请注意,J18 摄像头未进行流式传输)
gst_debug=tiovxisp:1 gst-launch-1.0 v4l2src device=/dev/video-ar0234-cam1 io-mode=dmabuf-import! 视频/x-Bayer、宽度=1920、高度=1200、帧速率=32/1、格式=grbg10! tiovxisp SINK_0:::device=/dev/v4l-ar0234-subdev1 sensor-name=“sensor_AR0234" dcc-isp-file=/opt/imaging/ar0234/linear/7th/dcc_viss.bin“ dcc-isp-file=/opt/imaging/ar0234/linear/7th/dcc_viss.bin SINK_0::ae-MODE=0 SINK_0::dcc-2a-file=/opt/imaging/ar0234/linear/7th/dcc_2a.bin format-mb=9! video/x-raw、格式=NV12、宽度=1920、高度=1200、帧速率=60/1! kmssink driver-name=tidss sync=false

4.我已经尝试并行检查两个摄像头的流媒体,但我 J18 摄像头 FPS 下降,和 J19 摄像头给出了损坏的流
gst-launch-1.0 -v \
v4l2src device=/dev/video-ar0234-cam0 io-mode=5! 视频/x-Bayer、宽度=1920、高度=1200、帧速率=30/1、格式=grbg10! 队列泄漏=2! tiovxisp SINK_0:::device=/dev/v4l-ar0234-subdev0 sensor-name=SENSOR_AR0234 dcc-isp-file=/opt/imaging/ar0234/linear/7th/dcc_viss.bin SINK_0::dcc-2a-file=/opt/imaging/ar0234/linear/7th/dcc_2a.bin format-msb=9 SINK_0:::pool-size=8 src::pool-size=8! video/x-raw、格式=NV12、宽度=1920、高度=1200! 排队! 马赛克.SINK_0 \
v4l2src device=/dev/video-ar0234-cam1 io-mode=5! 视频/x-Bayer、宽度=1920、高度=1200、帧速率=30/1、格式=grbg10! 队列泄漏=2! tiovxisp SINK_0:::device=/dev/v4l-ar0234-subdev1 sensor-name=SENSOR_AR0234 dcc-isp-file=/opt/imaging/ar0234/linear/7th/dcc_viss.bin SINK_0::dcc-2a-file=/opt/imaging/ar0234/linear/7th/dcc_2a.bin format-msb=9 SINK_0:::pool-size=8 src::pool-size=8! video/x-raw、格式=NV12、宽度=1920、高度=1200! 排队! 马赛克.SINK_1 \
tiovxmosaic name=mosaic \
SINK_0::startx=“<0>" SINK_0“ SINK_0::starty=“<0>" SINK_0“ SINK_0::width=“<960>" SINK_0“ SINK_0::高度=“<640>"\“\
Sink_1::startx=“<960>" Sink_1“ Sink_1::starty=“<0>" Sink_1“ Sink_1::width=“<960>" Sink_1“ Sink_1::高度=“<640>"!“! \
视频/x-RAW、宽度=2560、高度=1440! kmssink driver-name=tidss sync=false 
5.下面是 v4l2 的输出。 (连接两个摄像头时,摄像头 1 中的 fps 更低、但如果我在 J18 和 J19 中仅连接一个摄像头、则可以获得 30fps)

请告诉我们、我们如何解决此问题?
提前感谢。
