请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: AM6442
你(们)好
我正在跟进原始线程
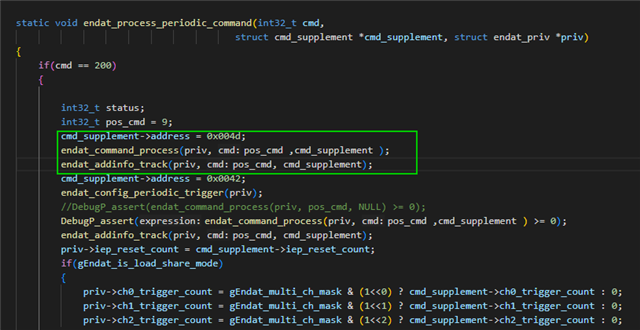
1) 何时将在 loadshare 模式下支持不同的 cmd
2) 我们是否在 loadshare 中的 CH0 和 CH1 上具有 cmd=9 的分辨率
谢谢
Alan I
器件型号: AM6442
你(们)好
我正在跟进原始线程
1) 何时将在 loadshare 模式下支持不同的 cmd
2) 我们是否在 loadshare 中的 CH0 和 CH1 上具有 cmd=9 的分辨率
谢谢
Alan I