Other Parts Discussed in Thread: AMIC110
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AMIC110 工具/软件:TI-RTOS
大家好、
我的客户使用 AMIC110实现 EtherCAT 从站功能。 整个解决方案是用于 EtherCAT +伺服的 AMIC110 + C2000。
设计即将完成。 但现在他们面临一个问题、即对于 AMIC110、如何在运行时检查应用程序中的一些变量。
对于 C2000器件、它可以检查运行时间中的变量、并可以设置刷新时间间隔。
但是、对于 AMIC110、似乎我们必须暂停应用、然后可以检查变量值。 换句话说、我们没有找到在运行时检查变量的方法。 这将导致在尝试调试整个系统时出现很多问题。 请查看以下应用场景:
当 EtherCAT 数据由 AMIC110接收或传输时、它将通过 SPI 接口将数据传输到 C2000。 然后、C2000将通过从 SPI 接收数据来调整其配置。 C2000能够在运行时检查参数以确保其数据正确、但是、在运行时无法在此过程中检查 AMIC110数据。 如果为了检查数据而暂停 AMIC110、则 EtherCAT 和 SPI 数据将会在 C2000始终运行时丢失并导致错误。
现在的问题是如何在运行时检查变量和值。 有人能帮您提出一些意见吗? 谢谢!
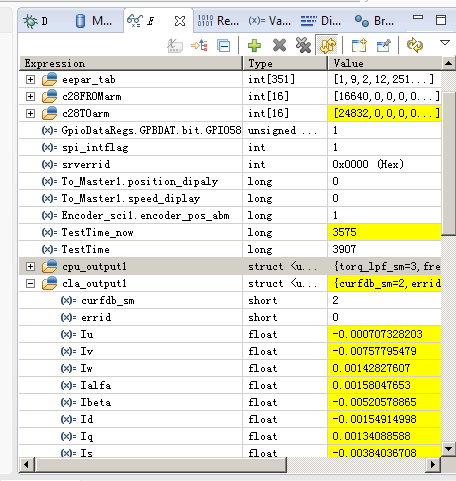
C2000可以在运行时成功进行变量检查、结果如下所示:
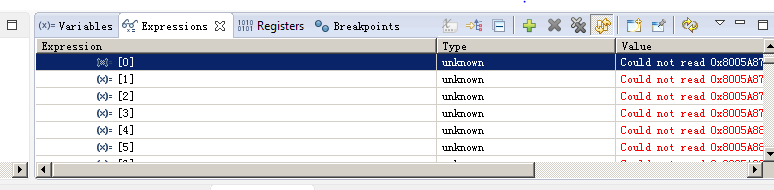
AMIC110在运行时无法成功进行变量检查、结果如下所示: