Other Parts Discussed in Thread: TMDSLCDK6748, TMS320C6748, OMAP-L138
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMDSLCDK6748 主题中讨论的其他器件: TMS320C6748、 OMAP-L138
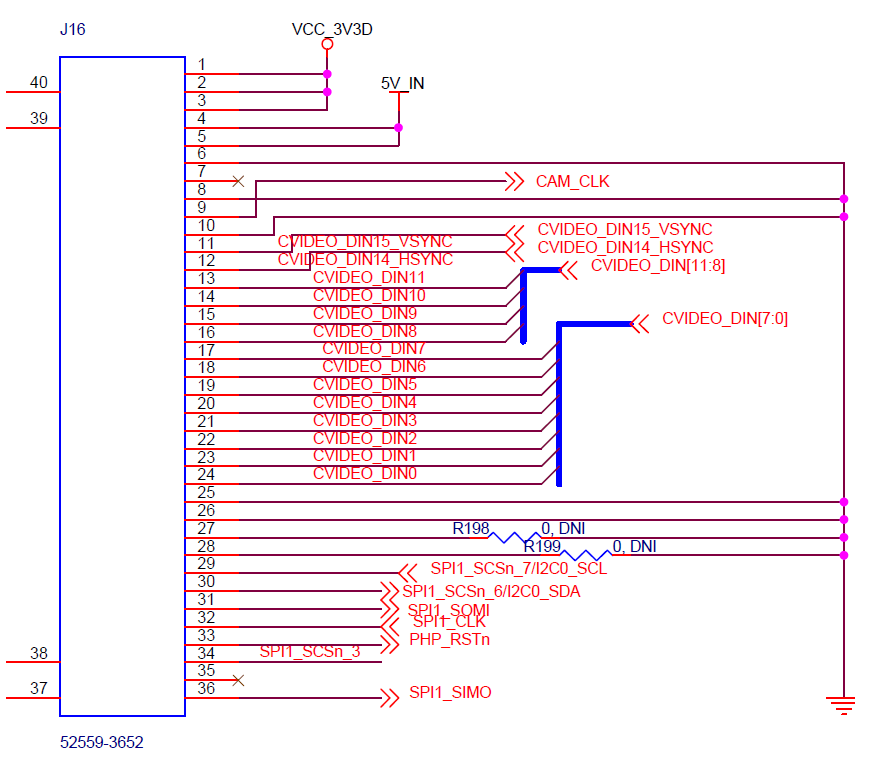
我使用 的是 TMDSLCDK6748 评估板。 我想使用 SPI0通信配置电路板中的 SPI 通信。 但是、J15中只有 SPI0_SIMO、SPI0_SOMI 和 SPI0_SCLK 引脚可用、任何输出跳线都没有芯片选择引脚输出。 它们似乎连接到 LAN IC、 U23、LAN8710A-EZK。 SPI1通信可用、似乎已连接到摄像头接头。
请建议一种在电路板中使用 SPI 通信的方法。