请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM62A7 主题中讨论的其他器件: SysConfig
工具与软件:
SDK 版本:9.2
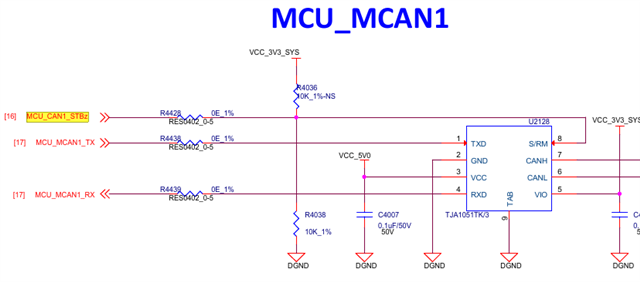
当我们使用 AM62A7中的 MCU CAN0、MCU CAN1和 SOC CAN0时、我们发现只有 MCU CAN0可以正确地发送和接收 FD 帧 、并进行比特率切换。 当 MCU CAN1 配置为与 MCU CAN0相同的配置时、MCU CAN1无法 在进行比特率切换的情况下正确发送 FD 帧 (可以正常发送和接收标准消息)。
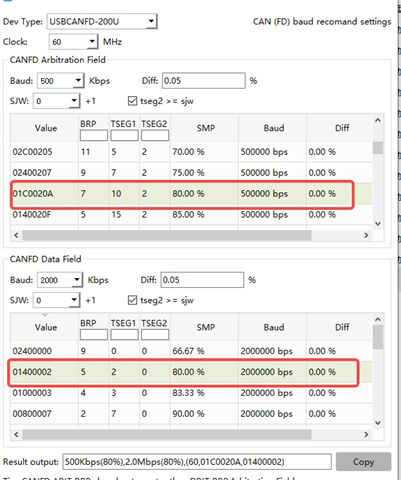
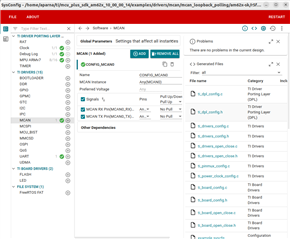
使用 ZLG 的 USBCANFD-200U 作为升序调试器件、并按如下所示设置通信参数:
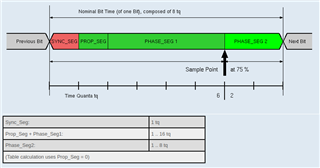
协议标准: 启用具有比特率切换功能的 CAN FD ISO、FD 帧。 仲裁波特率:500kbps、数据 字段波特率2Mbps、 采样点为 80%。
使用 此配置、 可以正常发送和接收具有比特率切换功能的 MCU CAN0 FD 帧。
修改 MCU CAN1通信配置参数、使其与 MCU CAN0一致。 研究发现只能正常发送和接收标准消息、但 可以接受调试器件发送具有比特率切换功能的 CAN FD 帧。 当 MCU CAN1尝试发送 具有比特率切换功能的 CAN FD 帧时、中断
触发 MCAN_INTR_SRC_PROTOCOL_ERR_DATA。 发送比特率切换的 FD CAN FD 帧失败。
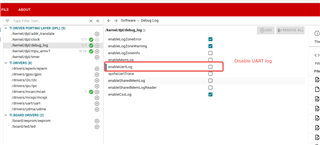
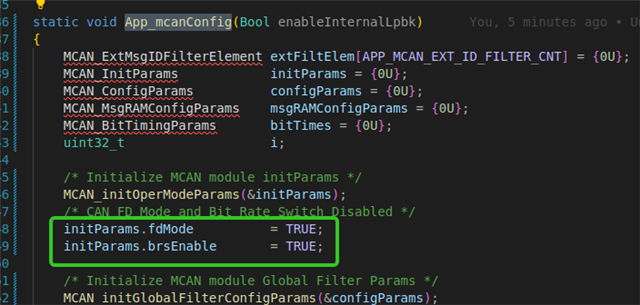
已初始化的配置参数:
/*初始化 MCAN Init 参数*/
MCAN_InitParams initParams;
initParams.fdMode = 1;// 0x1U;
initParams.brsEnable = 1;// 0x1U;
initParams.txpEnable = 0x0U;
initParams.efbi = 0x0U;
initParams.pxhddisable = 0x0U;
/*启用数据包的自动重新传输、
*将 initParams.darEnable 编程为"0"*/
initParams.darEnable = 0x0U;
initParams.wkupReqEnable = 0x1U;
initParams.autoWkupEnable = 0x1U;
initParams.emulationEnable = 0x1U;
initParams.emulationFAck = 0x0U;
initParams.clkStopFAck = 0x0U;
initParams.wdcPreload = 0xFFU;
initParams.tdcEnable = 0x1U;
initParams.tdcConfig.tdcf = 0xAU;
initParams.tdcConfig.tdco = 0x6U;
MCAN_init (gMcanBaseAddr、&initParams);
--------------------------------------------------------
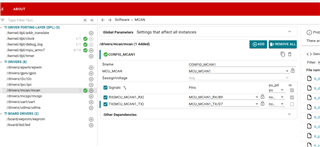
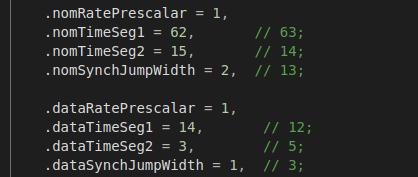
比特率设置:
/*配置位时序500Kbps 和2Mbps */
MCAN_BitTimingParams bitTimes;
bitTimes.nomRatePrescalar = 1;
bitTimes.nomTimeSeg1 = 70;// 63;
bitTimes.nomTimeSeg2 = 7;// 14;
bitTimes.nomSynchJumpWidth = 4;// 13;
bitTimes.dataRatePrescalar = 1;
bitTimes.dataTimeSeg1 = 15;// 12;
bitTimes.dataTimeSeg2 = 2;// 5;
bitTimes.dataSynchJumpWidth = 1;// 3;
MCAN_setBitTime (gMcanBaseAddr、&bitTimes);
--------------------------------------------------------
上述配置通常可以 在 MCU CAN0上进行比特率切换的情况下发送和接收 CAN FD 帧。 但它在 MCU CAN1上不起作用。
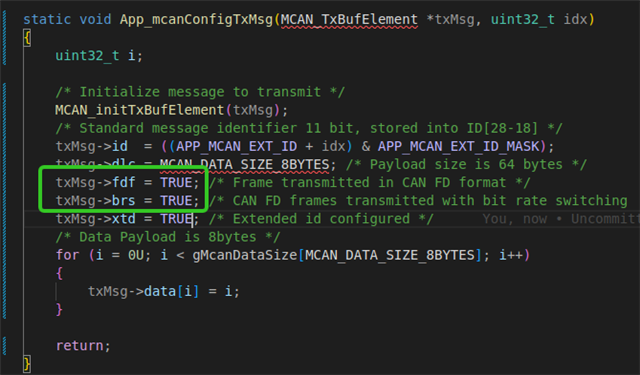
发送代码配置如下所示:
--------------------------------------------------------
MCAN_TxBufElement txMsg;
txMsg.id =(uint32_t)((uint32_t)(can_id)<< 18u);
txMsg.rtr = 0u;
txMsg.xtd = 0U;
txMsg.esi = 0u;
txMsg.1U = brs;
txMsg.FDF = 1u;
txMsg.efc = 1u;
txMsg.dlc = size_to_dlc (data_len);
memcpy (txMsg.data、data、data_len % 65);
当 MCU CAN1上的 TRS 为1时、上述配置将触发 MCAN_INTR_SRC_PROTOCOL_ERR_DATA 错误中断。 但在 MCU 上、CAN0状态良好。
当 TRS 为0且 FD 为 1时、MCU CAN1 正常接收 FD 帧。 但发送 FD 帧失败。 但是 标准 传统帧可以正常发送和接收。
我尝试 SOC MCAN0、MCU CAN1遇到相同的错误。
请 给我帮助。
谢谢你。








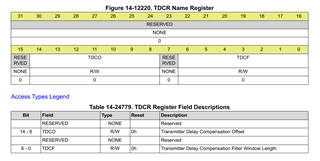
 第一次转储 TDC 为0、第二次转储 DLEC 为4、、即数据 BIT1错误、TDC 已更改为0xF。 所配置的 CPU。 TDC 设置为0。
第一次转储 TDC 为0、第二次转储 DLEC 为4、、即数据 BIT1错误、TDC 已更改为0xF。 所配置的 CPU。 TDC 设置为0。