请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:PROCESSOR-SDK-J721S2 主题中讨论的其他器件:TDA4VL、 AM68
工具与软件:
尊敬的团队:
我将调试 MCU、使其可以使用此代码正常工作
pdk_j721s2_10_00_00_27\packages\ti\csl\examples\mcan\mcanEvmLoopback\mcan_evm_loopback_app_main_k3.c
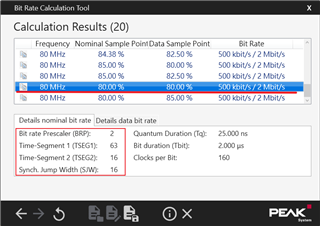
我按如下所示更改位时间。
静态 int32_t App_mcanConfig (uint32_t mcanInstAddr、bool enableInternalLpbk)
{
/*初始化位时序
*将1Mbps 和5Mbps 分别配置为标称比特率和数据比特率*/
BitTime
+ bitTimes.nomTimeSeg1 = 0x63U;
+ bitTimes.nomTimeSeg2 = 0x16U;
+ bitTimes.nomSynchJumpWidth = 0x16U;
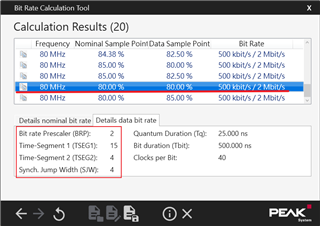
+ bitTimes.dataRatePrescalar = 0x2U;
+ bitTimes.dataTimeSeg1 = 0x15U;
+ bitTimes.dataTimeSeg2 = 0x4U;
+ bitTimes.dataSynchJumpWidth = 0x4U;
}
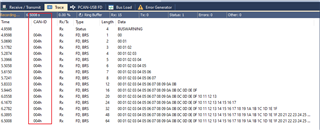
我将使用 python 接收 CAN FD 消息。
总线= CAN。 ThreadSafeBus (接口='pcan'、通道='PCAN_USBBUS1'、can_filters=filters、
f_clock_MHz=80、nom_BRP=2、nom_tseg1=63、nom_tseg2=16、nom_sjw=16、data_BRP=2、data_tseg1=15、data_tseg2=4、data_Sjw=4、FD=True)
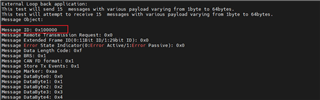
MCU UART 日志
1) python 接收 CAN 消息、因为该消息不正确。 "RX recv:timestamp:1733970171.484433 ID:0004 S Rx E DL: 4 01 00 7f 00"
这看起来像是某种错误消息。 这代表什么?
2)额定比特率 kbits/? 日期比特率 kbit/s?
3)哪个 寄存器地址是 CAN FD 波特配置?