请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TDA4VM 工具与软件:
尊敬的 TI 团队:
最近、我通过对 TI SDK Linux 工具链进行交叉编译、成功为 ARM 架构编译了 ORB-SLAM3。 将所有已编译的库从我的 PC 传输到 TDA4VM 后、我移动了整个 ORB-SLAM3目录、以及已编译的二进制文件(例如、`.so`文件)。 虽然没有可视化功能、但我现在能够在 TDA4VM 上成功运行 ORB-SLAM3、因为 TDA4VM 上的 Arago Linux 发行版缺少可视化支持。
目前、我可以从 ORB-SLAM3生成摄像头轨迹文件作为输出。 但是、我想直接在 TDA4VM 上以可视化方式显示这些文件。 此外、我想:
1.在 TDA4VM 上实现可视化。
2.确定 ORB-SLAM3的 FPS。
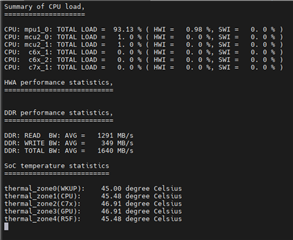
3.利用 C6x 和 C7x DSP 来减少 CPU 的使用量、因为 CPU 利用率目前约为95%。
我已经附上了 TDA4VM 在运行 ORB-SLAM3时的性能统计数据。 如数据中所示、未使用"C6x 和 C7x"DSP。
您能指导我实现这些目标吗?
感谢您的支持!
此致、
Ramaseshan