

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWR6843ISK 工具与软件:
您好!
我目前正在测试和分析 远距离人员检测 提供了示例 雷达工具箱2.10. .
。 sensorPositionCLI 命令用于设置 传感器高度、方位角和仰角倾斜 平均值。
但是、传感器输出(点云和目标 X、Y、Z)不应用sensorPosition 命令值;相反、它根据输出坐标 雷达的视场(FOV)参考系 .
此外、我发现了 Industrial Visualizer 代码使用sensorPosition 命令值执行坐标旋转。
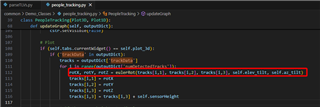
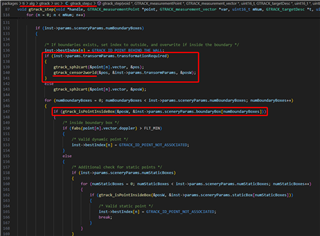
我已经检查了 Gtrack 算法 并在出现时发现 方位角倾斜不为零 、 点云坐标 都转换到 世界坐标系 .
但是、我没有发现任何转换应用于 BoundaryBox 坐标 .
我的问题:
- 传感器的 UART 输出(点云和目标 X、Y、Z)是否不应用
sensorPosition命令值? - 将坐标转换为 Gtrack 中的世界坐标系的目的是什么?
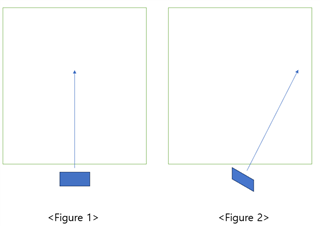
- 在估算 Gtrack 中的对象时、以下图示中的边界框使用了哪个形状?
谢谢。
