

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432AOPEVM 工具与软件:
我使用了 运动和存在检测演示。 在该配置中、
速度 吸顶式安装、 捕捉人体位置数据。 我需要启用人类/非人类分类器、还需要人类的微小运动。
"sensorPosition 0 0 2.5 0 90 \n \r"、
"minorStateCfg 5 4 40 2 1 40 8 20 \n \r"、
"clusterCfg 1 0.5 2 \n \r"、
"gatingParam 3 2 2 4 \n\r"、
"stateParam 3 12 50 5 200 \n\r"、
"allocationParam 6 10 0.1 4 0.5 20 \n\r"、
"maxAcceleration 0.4 0.4 0.1 \n\r"、
"trackingCfg 1 2 100 5 61.3 191.7 100 \n\r"、
"presenceBoundaryBox -2 2 -2 2 0 2 \n\r"、
"microDopplerCfg 1 0 0.5 0 1 12.5 87.5 1 \n\r"、
"classifierCfg 1 3 4 \n\r"、
当我放置上述配置时、代码没有执行。 调优指南中提到我们不能 同时使用 trackingCfg 和 minorStateCfg。
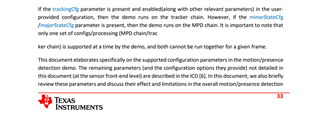
如果只启用了小动作、在吸顶式安装中、传感器将拾取小的幕布动作、同时也作为人类的小动作。 这是错误检测。 所以、如果我有次要的动议、无论是人还是非人、这都可以解决问题。 但我无法同时启用这两者!!! 如何解决该问题?
在 human_non-human _classification 中、它使用的是在壁挂式安装位置为人类训练的模型。 如何使用该模型或如何创建在天花板安装中对人体进行分类的模型。
