

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWRL6432 工具/软件:
尊敬的专家:
现在、我将 AWRL6432配置为低功耗模式并使用示波器观察电流。 (参见图 1)可以观察到射频活动的周期(红色)和信号处理(__LW_AT__蓝色),但是,有一个周期(绿色)中的电流大于信号处理的周期。 是否合理? 谢谢! (现在我的硬件已进行3.3V IO 模式和 BOM 优化)
图1. 使用 示波器测得的电流 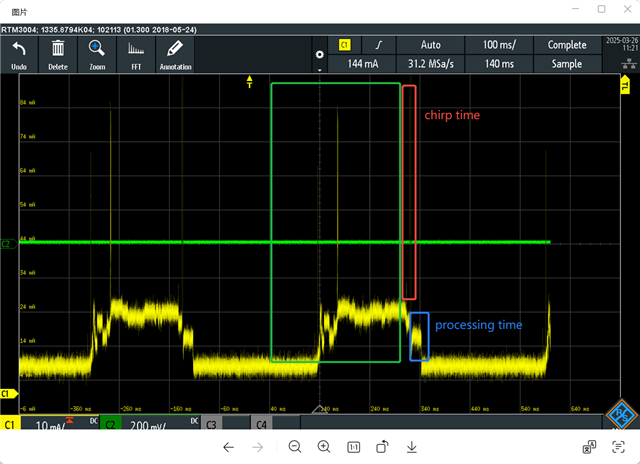
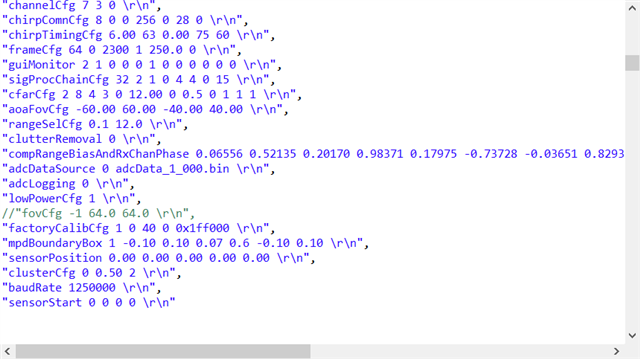
图 2 波形配置
此致、
Stan






