请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR1843AOPEVM 主题中讨论的其他器件:AWR1843、 AWR1843AOP
工具/软件:
主管您好:
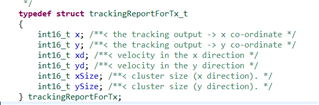
我使用的是 awr1843的中距离雷达示例。 我的目标是通过 CAN 协议发送跟踪信息、例如跟踪物体的距离和速度。 您能否提供帮助来满足这一要求?
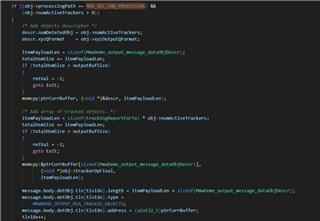
如下图所示、没有 d3h 的跟踪信息 TLV。 如何发送? 我试过,但我不能
此致。
工具/软件:
主管您好:
我使用的是 awr1843的中距离雷达示例。 我的目标是通过 CAN 协议发送跟踪信息、例如跟踪物体的距离和速度。 您能否提供帮助来满足这一要求?
如下图所示、没有 d3h 的跟踪信息 TLV。 如何发送? 我试过,但我不能
此致。