This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1523018/iwrl6432aop-radiation-pattern
工具/软件:
0度 FOV 是否 位于垂直于器件顶部表面的中心。
我们必须如何安装器件。
谢谢你
尊敬的 Mahalakshmi:
您能详细解释一下这个应用吗?
IWRL6432AOP 数据表(https://www.ti.com/lit/ds/symlink/iwrl6432aop.pdf)第7.13节"天线辐射方向图"描绘了随方位角和仰角变化的辐射方向图。 结果将归一化为视轴、通过查看它们、我们可以根据应用要求考虑天线位置。
理想情况下、视轴(0度 FOV)被视为位于 垂直于 IWRL6432AOP 器件顶部表面的中心。
谢谢、
Swarnendu
感谢您的意见。
我负责接近传感应用。
由于虚拟天线阵列具有不同的图案、而不是方形或矩形尺寸、因此我很困惑
大约是0度 FOV 或视轴将位于器件表面的位置。、
我从您的回复中了解到、FOV 的中心位于器件顶部表面的中心。
如果我们使用2TX 和3RX 天线、则 IWRL6432AOP 可以考虑多大的角分辨率。
我们是否可以采取、角度分辨率=2/(2*3)或
方位角和仰角分辨率对天线进行分区
(方位角分辨率为2/NTX)、仰角分辨率为2/Nrx、
请阐明此器件的角度分辨率。
谢谢你。
Mahalakshmi,
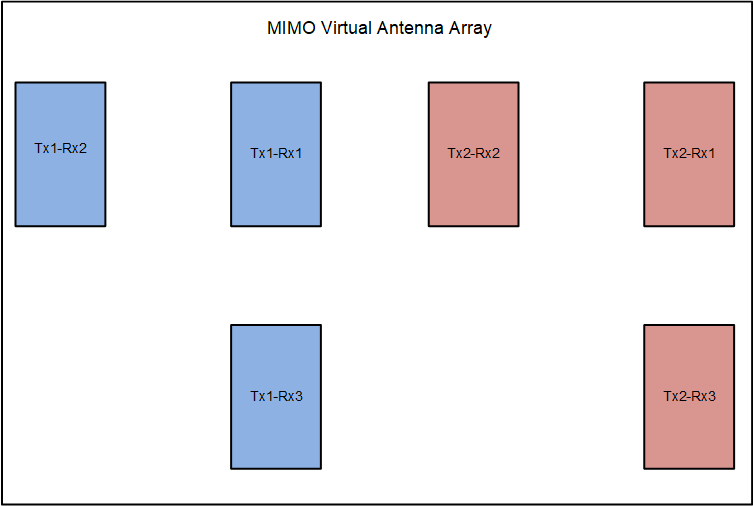
上面随附了 IWRL6432AOP 的虚拟天线阵列。 它在方位平面中有4个元件、在仰角平面中有2个元件。 因此、在方位平面中、它将提供2/4 * 180/PI =~28度的角分辨率、在仰角中、它将提供58度。
您可以在雷达工具箱中查看、了解有关虚拟天线阵列的更多详细信息以及其他详细信息: https://dev.ti.com/tirex/explore/node?node=A__AX3tKOzzaII2km8208OgmA__radar_toolbox__1AslXXD__LATEST