请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMAG3001 工具/软件:
你好
我参考 Exmaple_Code 此链接中提供的 TMAG3001制作一款产品。 :www.ti.com/.../TMAG3001
我有兴趣认识到磁体的角度变化、
我提到了 WOC_ANGLE_Example 区域。
Float prevAngle = 0.0;
Float currAngle = 0.0;
uint8_t ANGLE_hyst = ANGLE_HYST_8DEG;
//配置设备设置
TMAG3001enableMagChannels (MAG_CH_EN_XYZ); //启用磁通道
TMAG3001enableAngleMeasurement (ANGLE_EN_X1st Y-2nd); //配置器件以启用角度测量
TMAG3001setRanges (RANGE_80mTor240mT、RANGE_80mTor240mT);//配置器件的范围
TMAG3001interruptthroughINT (0x00); //将器件配置为在 INT 引脚上启用中断
TMAG3001intPinLatchedPulse (INT_STATE_Pulse); //配置设备的中断状态
TMAG3001enableWakeOnAngleChange (ANGLE_hyst); //为角度启用 WOC
//触发数据转换并读取初始角度测量值
//注意:该初始角度测量将用于检查中断是否由于而发生
// 角度变化由 ANGLE_hyst 指定、或由于角度从359->0或0->359变化
TMAG3001readSingleRegisterWithTrigger (CONV_STATUS_ADDRESS);//读取 CONV_STATUS 寄存器和触发器转换
DELAY_ms (1); //延迟以允许转换完成的时间
prevAngle = TMAG3001getMeasurementANGLE (); //读取初始角度测量值
TMAG3001 enterContinuousMeasureMode (); //启用连续测量模式以持续对数据进行采样
在该示例中、我看到 TMAG3001在初始化代码的最后一行中被设置为连续模式。
当我这样做时、每次角度发生变化时、都会出现中断、结果符合我的预期。
但是、我的产品是基于电池的、因此我必须在磁体不旋转时以低功耗等待。
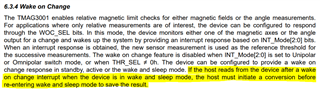
因此、我尝试更改该器件以进入 WakeAndSleep 模式。
但执行此操作时、我会以大约2~5ms 的周期获得无限中断。
这与我直觉上的想法完全相反。
是否缺少一些其他设置? 或者我不能同时使用低功耗性能和 WOC_ANGLE 特性?
请提供建议。
此致。