

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:IWRL6432BOOST 工具/软件:
您好、
我正在使用 https://dev.ti.com/gallery/view/mmwave/mmWaveSensingEstimator/ver/2.5.0/ 、并且看到此实体公式的 tooptip 信息。 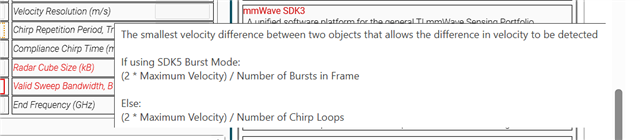
但应用程序后端代码如下所示:
if (frameCfg5_NumOfBurstsInFrame > 1){
//应除以每个 Tx 的线性调频脉冲数
返回((2 * RESULT_maxVelocity)/(frameCfg5_NumOfBurstsInFrame / deviceBoardParam_numTx天 线) );
}
否则{
//我们不关心线性调频脉冲总数、仅关注每个 Tx 的线性调频脉冲数
返回((2 * RESULT_maxVelocity)/chirpParam_numChirpLoops);
在早期毫米波估算器应用代码的 Java 代码中、工具提示中也没有 numTX天 线进行这种除法。
您能否确认所使用的正确配方是什么?
