

主题:AWR2944中讨论的其他器件
工具/软件:
您好、
我们使用 带 TDM 配置的 OOB 演示、根据以下文档和雷达配置、一些问题需要澄清
/ti/mmwave_mcuplus_sdk_04_04_01_02/mmwave_mcuplus_sdk_04_04_01_02/ti/datapath/dpu/rangeproc/docs/doxygen/html/dpu_rangehwa.html
雷达配置:
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 15 0
adcCfg 2 0
adcbufCfg -1 1 1 1
低功率0 0
profileCfg 0 77 186 7 57.14 0 0 70 1 656 13349 0 30
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 1 0 0 0 0 4
chirpCfg 2 2 0 0 0 0 0 8
chirpCfg 3 3 0 0 0 0 2
frameCfg 0 3 16 0 656 100 1 0
1.根据 OOB 源代码和雷达配置、该值 应低于设置值。
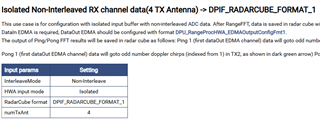
2、雷达立方体是否如下所示?
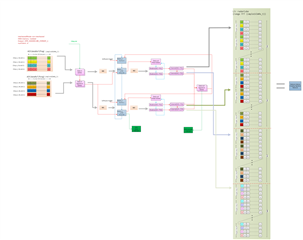
3.如果我们使用 UART 输出雷达立方体、我们如何验证数据顺序与上图中的布局相同?
typedef 结构 DPIF_RadarCube_t
{
/*! @简短雷达立方体数据格式@ref DPIF_RADARCUBE_FORMAT */
uint32_t 数据 afmt、
/*! @雷达立方体缓冲区简短大小(以字节为单位)*/
uint32_t dataSize;
/*! @简短的雷达立方体数据指针
用户可以使用将其重新映射到特定的 typedef
@ref DPIF_RADARCUBE_FORMAT */中的信息
void *数据;
}DPIF_RadarCube;
4.我们希望 自己获得雷达立方体和计算检测矩阵。
谢谢
BRS
Bruce
