

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944 工具/软件:
你(们)好
德州仪器团队:
最近、在测试过程中、我们遇到了一个问题。
在正常的城市道路上行驶时、将检测到位于道路中间的固定隔离栅、作为具有一定速度的移动目标。
道路状况如下图所示:栏杆是空心铁管、而不是单一平面。


实际的点云效应如下:所示
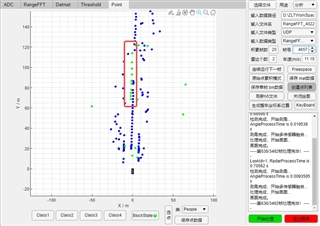 蓝色表示静止目标、而绿色表示移动的目标。
蓝色表示静止目标、而绿色表示移动的目标。
2D-FFT 结果如下:
 红色框区域中的目标是速度测量不正确的位置。
红色框区域中的目标是速度测量不正确的位置。
我以前在使用 NXP 时也遇到了相同的问题。 您能告诉我这是什么原因造成的吗? 您能帮我解决这个问题吗?
此致
Minxi
