请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AWR2944 工具/软件:
尊敬的 TI 团队:
我有以下问题。 如果您能回答这些问题、我将不胜感激。 谢谢你。
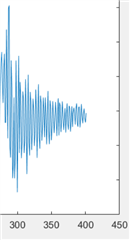
问题 1。仅使用一个发射天线时、每个线性调频脉冲的相位会增加 5.625°。下图显示了不执行和执行 RFINIT 校准的结果。 图中的值代表了每个线性调频脉冲之间的相位差。
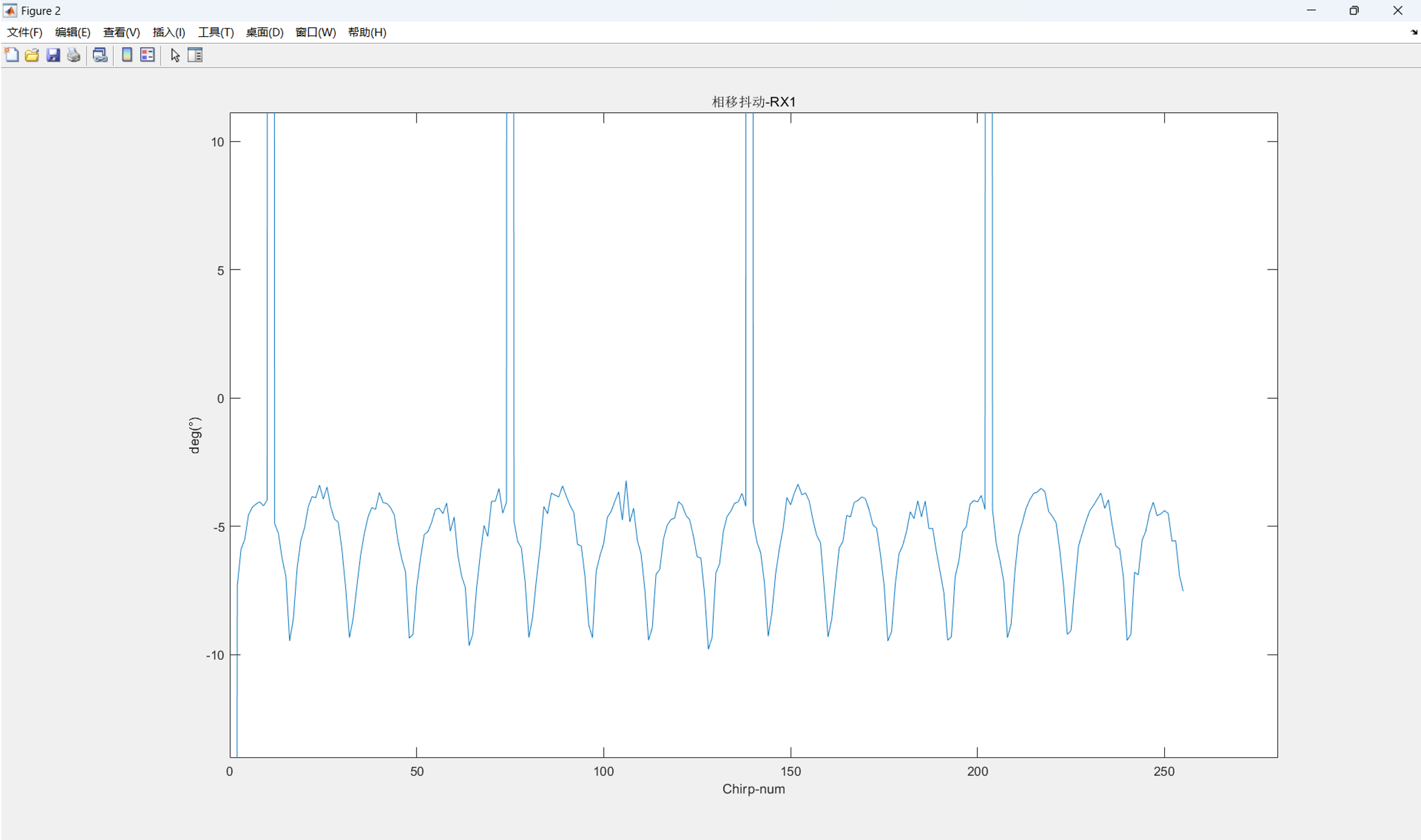
启用 RFINIT 校准后的结果阶段似乎变得更加稳定。 这是否证明 API 调用正确并且相位校准已生效?
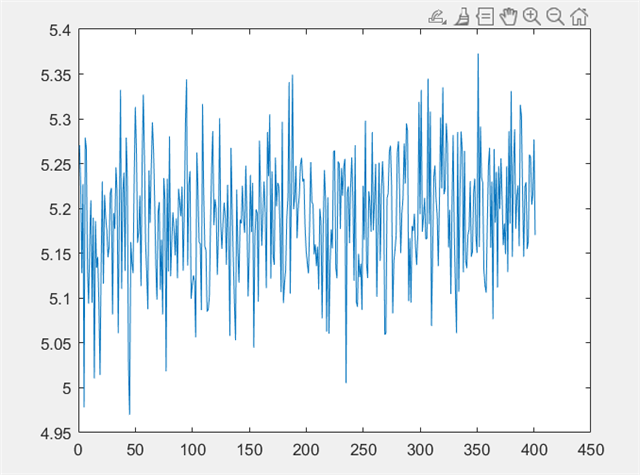
问题 2。但是、每个帧中第一个线性调频脉冲的相位偏差非常大、并且同一个线性调频脉冲在不同帧中的相位值不稳定。 这是正常的吗?
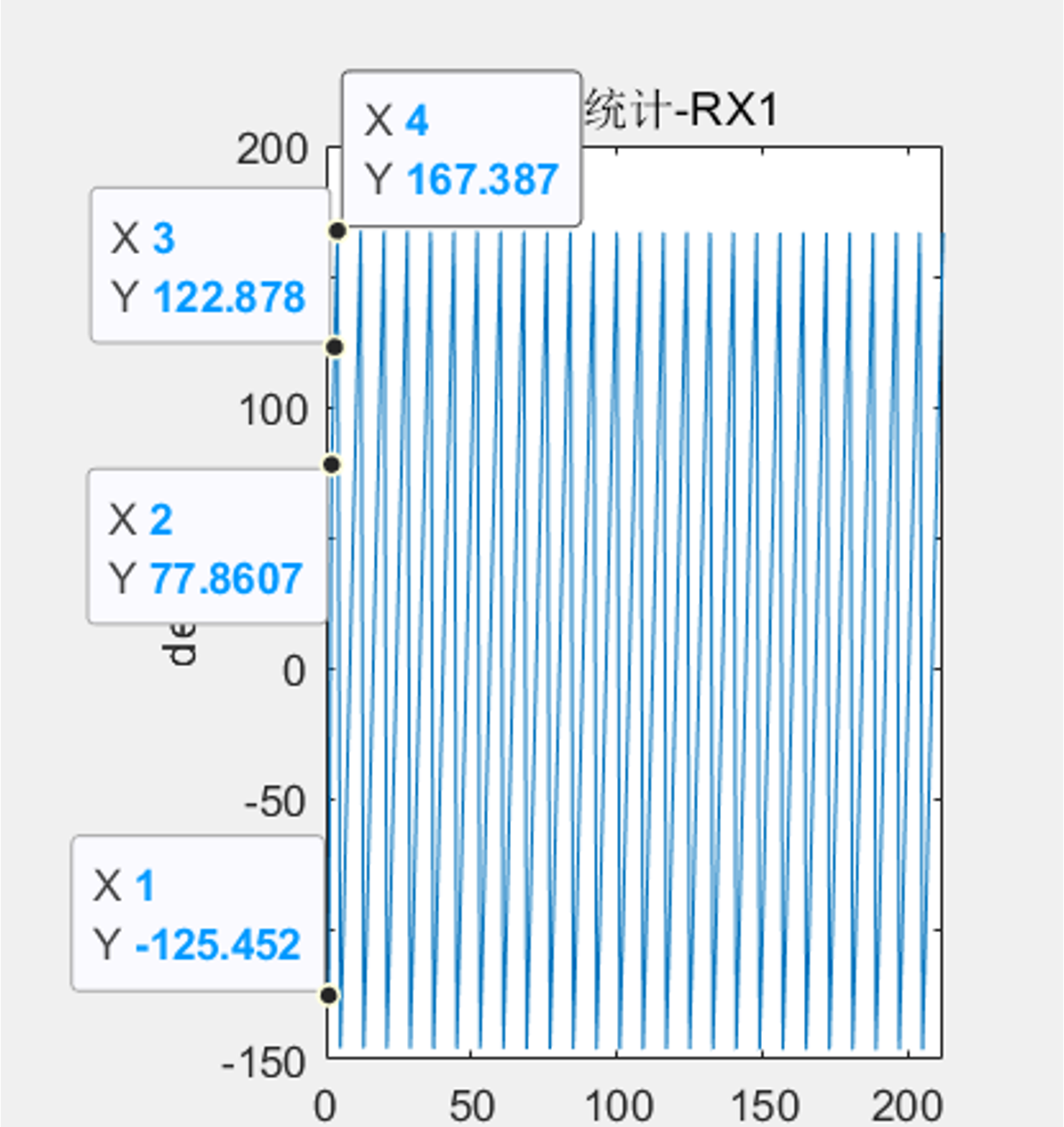
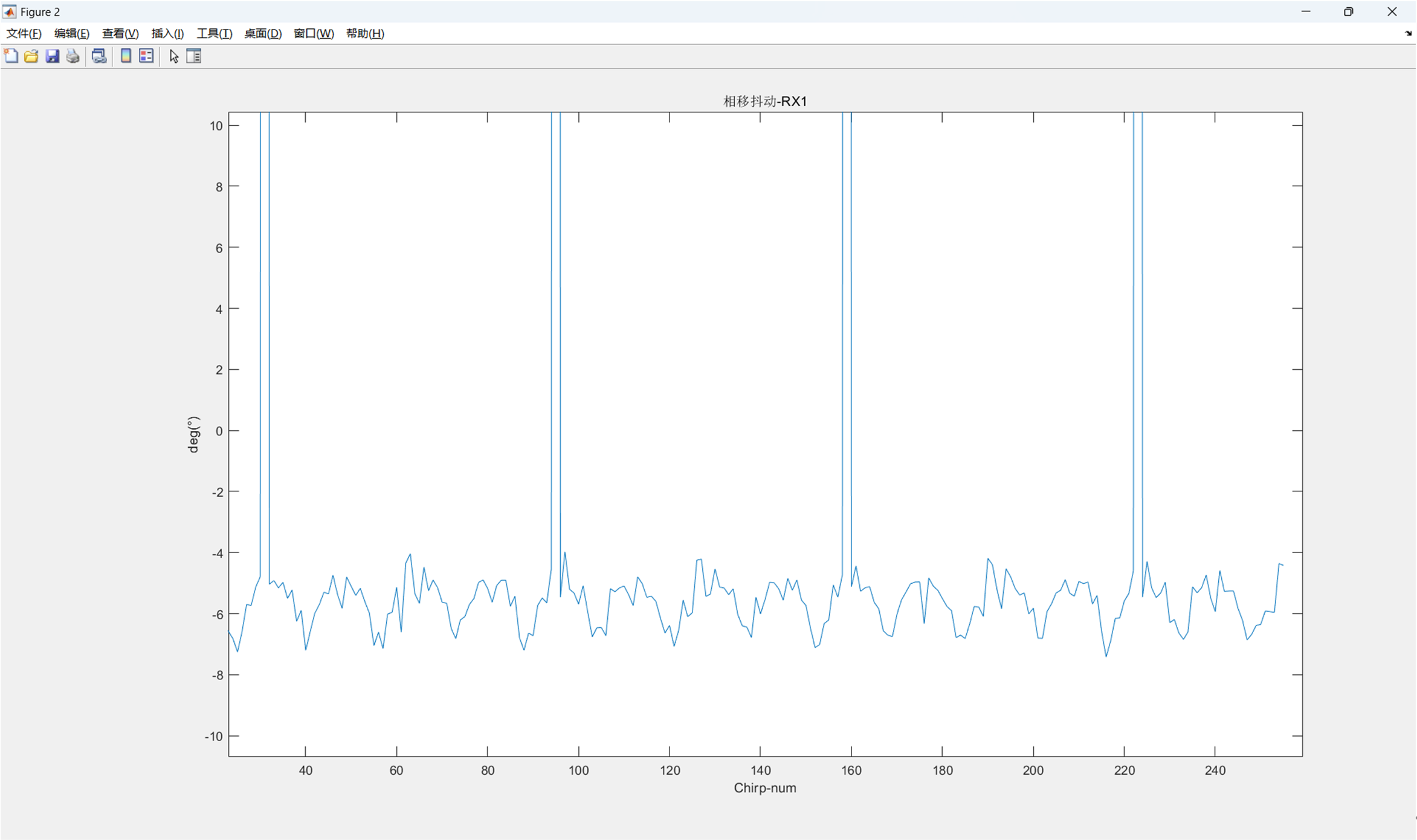
上图展示了相移设置为 45°时的结果。 左右两个图中显示了每个线性调频脉冲的实际相位。 四个标记的线性调频脉冲的实际相位值相差很大、但 Delta 大致相同。 此外、第 2 个、第 3 个和第 4 个线性调频脉冲的差异是围绕 45°的、这与设计值一致。 但是、第 1 个线性调频脉冲和第 2 个线性调频脉冲之间的差异非常大。
问题 3、对于 2944、如果要执行自动校准和温度补偿、是否只需配置和调用“rlRfRunTimeCalibConfig"即可“即可实现自动校准? 是否需要执行任何其他步骤?
此致
Minxi